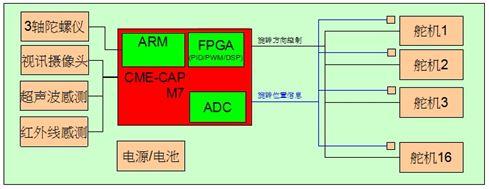
基于京微雅格CME-M7的智能機器人控制系統設計與實現

二、特性介紹與設計應用
本文引用地址:http://www.j9360.com/article/268457.htm• 實現了高性能MCU內核與大容量FPGA的無縫結合
內含192K Bytes 高速SRAM與外擴DDR I/II/III內存,并透過PBUS總線在內部銜接MCU外設與FPGA,在信息或取與數據運算之間透過FPGA做實時快速處理,并接續到MCU的高速運算,達到及時的控制要求
• FPGA邏輯單元高達12K
200 MHz最大頻率,高達11520個4輸入查找表,7680個DFF寄存器,144個EMB5K(4.5Kbit可配置雙端口DPRAM存儲器),可以充分可重復編程硬件,大容量高速度與強大重新編程重新配置能力,有效縮短產品上市時間與功能修正
• 更高等級處理器
300 MHz最大頻率,1.25 DMIPS/MHz(Dhrystone 2.1)性能,單周期乘法指令和硬件除法指令,2個AHB主/從總線接口,可以在線調試模式,支持串行線調試接口(SWD)和JTAG接口
支持嵌入式Trace Macrocell™,’采用哈佛結構,1.25DMIPS/MHz和0.19Mw/MHz,Thumb-2指令集以16位的代碼密度帶來了32位的性能,內置快速的終端控制器,中斷間的延遲時間降到只需6個CPU周期,從低功耗模式喚醒的時間只需6個CPU周期,與ARM7TDMI®相比運行速度最多可快35%且代碼最多可節省45%
• 2個12位1MSPS ADC模塊
可充分應用于環境偵測,動作位置定位感知,搭配于FPGA的邏輯單元,可以實現不經由MCU即可達到硬件運算修正的要求,實現實時高速運算控制要求
• 豐富的I/O資源與封裝,以硬核形式整合以太網、USB、CAN、DMA控制器以及DDR控制器等外設
可以同時支持超過80組伺服電機控制,遠超過一般MCU的控制極限,讓每單元都獨立運作,透過以太網、USB、CAN、 PCI,PCI-X可以實現對不同模塊的通訊,甚至連接計算機與網絡都不是問題
• 高精度PLL 及時鐘網絡
4個PLL,支持倍頻、分頻、相移、de-skew,8個外部時鐘輸入,1個外部晶體時鐘輸入,16個de-skew全局時鐘,高精度的高速時鐘源可以讓內部時鐘可以達到300MHZ的穩定運算
• 靈活的乘加器實現DSP
嵌入式DSP ,- 48個18x18或 96個12x9 DSP(MAC),可以組合成浮點運算器,豐富的乘累加器多達32組,可以讓運算更簡捷迅速與精確,機器人控制再也不需要額外DSP芯片即可達成
• 基于Efuse和AES的保密機制
配置訊息的可加密,難破解,讓使用者的科研開發成果得以保持優勢,進而保持產品價值優勢
• 超高系統性價比
基于高度整合于單一芯片,有性能高 體積小 價格低的持續優勢
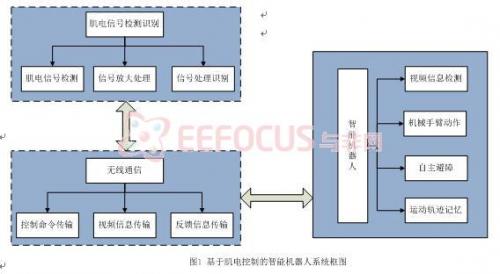
CME-M7產品可應用在機器人控制中所需的核心如工業控制機器人、安防監控機器人、和家居機器人等領域。讓機器人工能在設計上變得更簡單又強大。




評論