用可編程模擬器件實現直流伺服電機的速度控制

1 引 言
本文引用地址:http://www.j9360.com/article/267221.htm直流伺服電機具有響應快、低速平穩性好、調速范圍寬等特點,因而常常用于實現精密調速和位置控制的隨動系統中,在工業、國防和民用等領域內得到廣泛應用,特別是在火炮穩定系統、艦載平臺、雷達天線、機器人控制等場合。盡管交流伺服電機的發展相當迅速,但在這些領域內還難以取代直流伺服電機。
傳統的直流調速系統包含2個反饋環路,即速度環和電流環,采用測速機、電流傳感器(霍爾器件)及模擬電子線路實現速度的閉環控制。現代數字直流伺服控制則采用高速數字信號處理器(DSP),直接對速度和電流信號進行采樣,通過軟件實現數字比較、數字調節運算(數字濾波)、數字脈寬調制等各種功能,從而實現對速度的精確控制。二者相比,模擬調速系統結構簡單、成本低、可靠性高,但調試較復雜,因為其電路參數的修改往往需要硬件上的改動;而數字調速系統結構復雜、成本高,但是調速精度很高、調試過程也較容易,調速系統的性能可以由軟件進行控制。
本文介紹一種方法,介于模擬調速及數字調速二者之間,即采用可編程模擬器件(ispPAC10)實現模擬調速系統,系統的電路參數可以通過軟件進行調整,并且可以對建立的系統模型進行仿真。采用這種方法對原有的直流調速器一種CCD相機的自動變焦系統進行改進,取得了很好的效果。
2 模擬直流調速系統的組成和工作原理
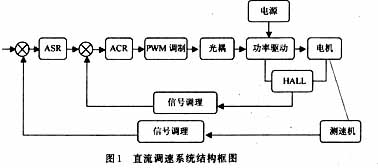
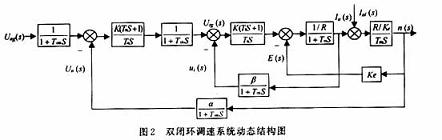
模擬調速系統一般是由2個閉環構成的,既速度閉環和電流閉環,為使二者能夠相互協調、發揮作用,在系統中設置了2個調節器,分別調節轉速和電流。2個反饋閉環在結構上采用一環套一環的嵌套結構,這就是所謂的雙閉環調速系統,他具有動態響應快、抗干擾能力強等優點,因而得到廣泛地應用。圖1是系統的結構框圖,其中ASR,ACR分別是速度和電流調節器,通常是由模擬運放構成PI或PID電路;信號調理主要是對反饋信號進行濾波、放大。考慮到直流電機的數學模型,模擬調速系統動態傳遞函數關系如圖2所示。
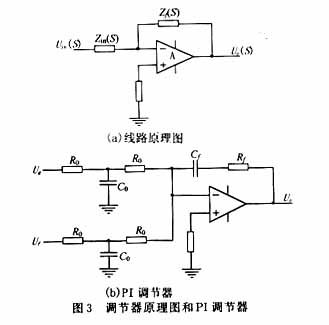
以速度調節器ASR為例,其線路原理如圖3(a)所示,其中Zin(S)表示輸入網絡的復數阻抗,Zf(S)表示反饋網絡的復數阻抗。
這樣:
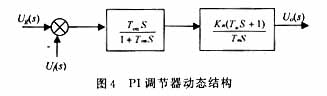
即調節器的傳遞函數等于反饋網絡與輸入網絡復數阻抗之比。所以,改變Zf(S)和Zin(S),就可以獲得所需要的傳遞函數,以滿足系統動態校正的需要。圖3(b)所示的PI調節器,其動態結構如圖4所示。
其中:
在模擬調速系統的調試過程中,因電機的參數或負載的機械特性與理論值有較大差異,往往需要頻繁更換R,C等元件來改變電路參數,以獲得預期的動態性能指標,這樣做起來非常麻煩,如果采用可編程模擬器件構成調節器電路,系統參數如增益、帶寬甚至電路結構都可以通過軟件進行修改,調試起來就非常方便了。下面以圖3所示PI調節器為例,說明如何應用可編程模擬器件—ispQAC10實現模擬調節器電路。
3 實現方法
3.1 ispPAC10簡介
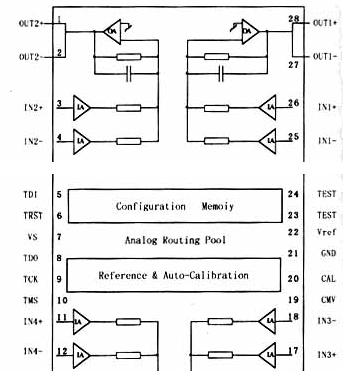
ispPAC10是Lattice公司生產的一種在系統可編程模擬器件,采用非易失性E2CMOS工藝,其內部的模擬部件塊“PACblocks”無需外接電阻、電容等元件,便可代替傳統的模擬電路,如運算放大器、濾波器等;通過軟件編程,可實現電路的設計和修改,極大地縮短了開發、調試周期,具有很高的性能價格比。Lattice公司為開發ispPAC10而提供的集成軟件包PACDesigner功能強大、易學易用,可以在網上下載。ispPAC10內部包含4個模擬部件塊—內部結構如圖5所示。
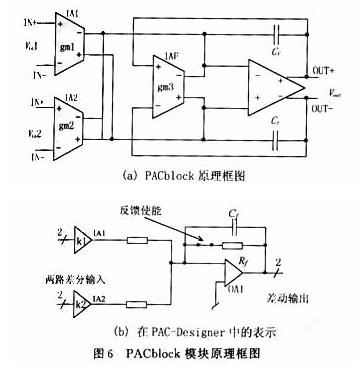
PACblock電路原理圖如圖6(a)所示,圖6(b)是PAC-Designer軟件包中PACblock的表示。
其傳遞函數關系如下:
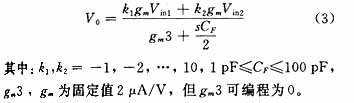
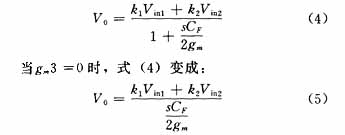
這樣,式(3)還可以寫成如下形式:

pid控制相關文章:pid控制原理
霍爾傳感器相關文章:霍爾傳感器工作原理
伺服電機相關文章:伺服電機工作原理
pid控制器相關文章:pid控制器原理
霍爾傳感器相關文章:霍爾傳感器原理 脈寬調制相關文章:脈寬調制原理 調速器相關文章:調速器原理





評論