基于CAN總線的自動光學檢測通信系統設計

在現代工業自動化生產中,涉及到各種各樣的檢驗、生產監控及零件測量、識別應用等環節,然而通常人眼很難連續、穩定地完成這些帶有高度重復性和智能性的工作,一般物理量傳感器也較難實現這些功能。而利用光電成像系統采集被檢測目標的圖像,并經計算機或專用的圖像處理模塊進行數字化處理。與一般圖像處理系統相比,自動光學檢測更強調精度、速度,以及工業現場環境下的可靠性。因此,這里提出一種基于CAN總線的自動光學檢測通信系統設計方案,該系統設計能夠滿足PCB自動光學檢測控制系統的指標要求。
本文引用地址:http://www.j9360.com/article/264096.htm1 自動光學檢測通信系統分析
自動光學檢測系統具有快速準確、可重復性強以及自動化程度高等特點。自動光學檢測技術的出現極大地減輕了人工檢測的壓力,解決了傳統人工檢測中的許多問題,提高了產品的檢測質量和速度,為工業領域自動檢測提供了革命性的解決方案。
分布式的現場總線能同時滿足過程控制和制造業自動化的需要,成為了該自動光學檢測系統的最佳選擇。分布式的現場總線控制系統比集散型控制系統更好地體現了 “信息集中、控制分散”的特點。且分布式控制系統在適用范圍、可擴展性、控制速度、系統模塊化、可維護性、抗單點故障等方面具有明顯優勢。
控制器局域網(CAN)總線是一種在工業控制中應用的總線,帶寬利用率高,糾錯能力強,并且廢除了傳統的站地址編碼,采用對通信數據塊進行編碼,可以多主方式工作;運用非破壞性仲裁技術,有效避免了總線沖突;短幀結構,數據傳輸時間短,受干擾的概率低,重新發送的時間短;每幀數據都有CRC校驗及其他檢錯措施,保證了數據傳輸的高可靠性,適用于高干擾環境下;節點在錯誤嚴重的情況下,具有自動
關閉總線功能,使總線上其他操作不受影響;可以點對點,一對多及廣播集中方式傳送和接收數據。因此,CAN總線滿足該控制系統的數據總線要求。
本設計采用英飛凌開發的16位微控制器系列中的XCl64CS為控制器,并成功地將其應用到PCB板面缺陷自動光學檢測儀的控制系統。
2 通信系統總體設計方案
2.1 系統組成原理
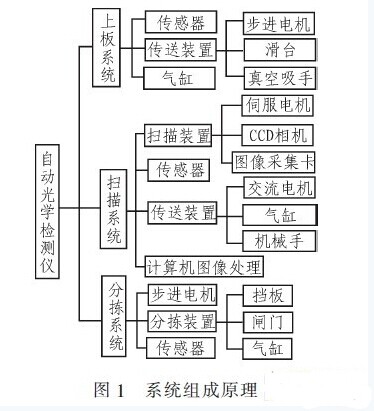
自動光學檢測系統由上板部分、掃描正面、掃描反面、分揀1、分揀2以及主機共6部分組成,整個系統使用的電機有5類共19個、氣缸11個以及各類傳感裝置若干。整個系統架構如圖1所示。
由于整個控制系統對實時性、穩定性以及協調性要求很高,整個控制模式分為制作標準板模式、單步運行模式以及檢測模式,對于模式間轉換的靈活性要求也很高。而分布式控制系統因其具有高可靠性、開放性、靈活性、協調性、控制功能齊全和易于維護等特點,完全滿足本控制系統的要求。
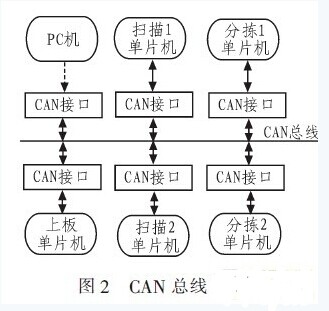
分布式控制系統使用較多的網絡拓撲結構有星型、環型和總線型3種。其中星型結構(中央控制型)中所有通信都經中央控制節點,若中央控制節點有故障,則整個系統就會癱瘓;環型結構中相鄰控制節點順序連接,形成環路,信息一般僅以一個方向在環上從源節點傳送到目的節點,發生故障時可支持雙向傳輸,但環路一般封閉,不利于節點的擴充;而總線型結構的所有節點都共享一個公共的物理通道(即總線),因此網絡上的任意一個節點均可在任意時刻主動向網絡上的其他節點發送信息,且具有延遲小、速度快、易擴展、單個節點故障影響小的優點。因此,該控制系統采用總線型拓撲結構,如圖2所示。
2.2 CAN總線硬件電路設計
為了保證控制系統的技術指標,完成實時數據處理和電路保護功能,并考慮到系統的擴展性,采用16位微控制器系列中的XCl64CS。該芯片尺寸小、運算速度高,并集成有TwinCAN模塊,該模塊用于控制幀的自動發送和接收。該模塊有2個全功能的CAN節點共享模塊的資源,提供32個報文對象,它們可獨立分配給2個CAN節點中的任意一個,還可以組合構成FIFO結構。每個報文對象分別對應有利于濾波的驗收屏蔽寄存器。
全CAN功能和FIFO結構的靈活組合可滿足復雜嵌入式控制應用的實時要求。CAN總線監控功能的增強以及報文對象個數的增加使得CAN的總線通信處理更加精確和方便。網關功能允許在2個獨立的CAN總線系統之間進行自動數據交換,減輕了CPU負載,提高了整個系統的實時性。2個CAN節點的位定時都從主時鐘得到,可通過編程使數據速率達到1 Mb/s,
CAN總線收發器采用英飛凌公司的TLE6250G,支持傳送速率高達1 Mb/s,具有抗瞬變、抗射頻和抗電磁干擾的特性,并具有寬泛的工作范圍(-40~150℃),以及短路保護和過溫保護功能。具體的CAN總線節點原理圖設計如圖3所示。
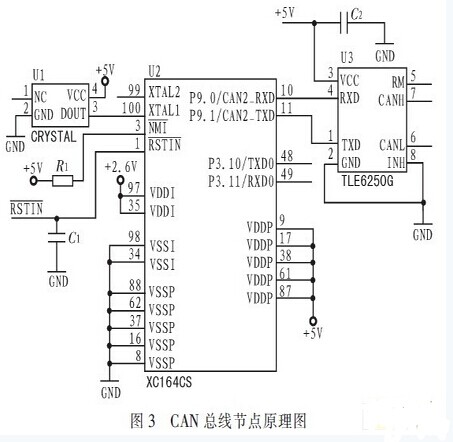
另外,總線連接時兩端各加一只120 Ω的電阻,它們對于匹配總線阻抗起著相當重要的作用,可減少信號反射干擾。
2.3 CAN總線節點軟件設計
CAN總線節點軟件設計與整個系統的實時性和可靠性密切聯系。本系統中各部分間的數據交換比較頻繁,CAN總線上傳輸的數據幀包括有:1)主機發送的控制指令幀,主機控制著整個系統的工作模式,通過PCB板為好板或壞板的信號來控制分揀1和分揀2的運作;2)各控制部分傳給主機的狀態信息,將正在上板中、正在出板中或者系統故障等消息傳給主機,方便操作人員實時了角整個系統信息;3)各控制部分之間的信息交換,如上板部分檢測到一批PCB板檢測完成,通知分揀部分出板的信號,任何部分檢測到故障通知報警信號等。
根據系統的實際情況未編寫相應的軟件程序。這里使用的XCl64CS單片機的CAN控制器遵循CAN V2.0B規范。報文緩存單元最多保存32個報文對象,每個對象的最大數據長度為8字節。每個報文對象有一個標識符和自己的控制和狀態位集。通過控制相應寄存器來存放通信時發出或者接收到的數據以及報文寄存器組的設置。對報文寄存器進行初始化之后,報文緩存單元無需CPU監控就能夠處理數據的接收和發送,簡化了軟件代碼的編寫。而CPU通過訪問CAN控制器狀態寄存器或者由CAN控制器以中斷的方式通知CPU,即可得到當前通信狀態,從而節省了CPU的占用時間。

通信相關文章:通信原理








評論