GPS和3G在智能公交終端設計中運用

隨著經濟的發展,城市公交事業有了迅猛的發展,主要表現在:車輛變靚,站點增加,營運時間延長,線路增多,市民出行時已感到這種可喜的變化。但隨著生活節奏的加快,對生活品質要求的提高,乘客們早已不能滿足于現有的服務質量。乘客的服務要求不僅體現在乘車過程中,還體現在乘車前后;不僅需要有車乘,而且需要乘好車、好乘車。這些多層次、多元化的需求都是傳統運營模式、調度方式所無法做到的,只有智能公交系統的實施才能夠從根本上解決這些問題。智能公交系統的實施,不僅可以給乘客帶來巨大的利益,提升城市形象,還以為公交企業節約大量經營成本,提高科學管理水平。因此智能公交系統的建設著重大的社會效益和經濟效益。
本文引用地址:http://www.j9360.com/article/260156.htm智能公交系統由以下幾部分組成:
1)車載設備子系統,簡稱“車載終端”;
2)車站智能電子站牌子系統;
3)公交管理系統。
文中主要以車載設備子系統--車載終端為研究對象展開論述。
1 系統整體方案設計
文中研究的是一種基于GPS和3G的智能公交終端,簡而言之就是研究車體部分車載終端設備。本文的研究主要分3大部分:視頻監控部分;GPS定位部分;通過現有3G網絡傳輸部分。
視頻監控部分,主要是在車廂外部設置2個攝像頭,車廂內部設置4個攝像頭。車廂外部在車的前后各設置一個攝像頭,用來監控車體的前后車況,為交通意外發生后的責任判定提供有力證據。車廂內部在司機處設置1個攝像頭,用來監控司機是否有打電話,閑聊等違規操作;在票箱處設置1個攝像頭,用來監控偷票漏票現象;在車體中間設置1個攝像頭,用來防止乘客碰瓷索賠,車內偷盜等,減少公交車上的犯罪率。下客門設置1個攝像頭,用來觀看乘客下車情況,乘客是否全都下車,是否有乘客從后門上車等逃票現象。
GPS定位部分,實現完善的導航功能。通過GPS全球定位系統確定公交車所在位置信息,把公交車所在的位置,路況信息可以實時的傳送到PC機監控端,這樣對車輛的調度起到關鍵的作用。
3G網絡傳輸部分,近年來我國的3G網絡已經很成熟了,可以高效的傳輸視頻信息,本系統就是通過3C網絡將公交車上采集到的視頻信息和CPS信息傳輸到控制端,實現公交車運行時的全程監控。系統整體設計方案如圖1所示。
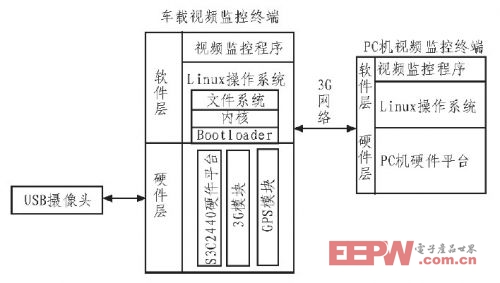
圖1 系統總體設計框圖
2 系統硬件設計
硬件設計上,本系統采用ARM微處理器S3C2440芯片作為主控芯片,系統為存儲擴展了128MB的NANDFLASH和64MB的SDBAM,這樣可以更好的儲存視頻信息。系統的外圍擴展模塊包括通用USB攝像頭、GPS模塊、3G模塊和LCD顯示屏。系統的硬件框圖如圖2所示。
圖2 硬件系統設計框圖
2.1 主控芯片的選擇
本系統設計的監控終端要求多路傳輸,實時性強,低功耗等特點。因此本系統的主控芯片選擇了內核為ARM920T的ARM9處理器。由于S3C2440芯片應用比較廣泛,片內資源豐富,資料齊全,價格適中,所以選擇它作為系統的微處理器。該處理器是一款基于RISC的32位微處理器,工作頻率為400 MHz,最高可達533 MHz,滿足了舉系統對處理速度的要求,同時該處理器還集成了豐富的通信接口和控制器,有效地降低了系統的復雜度,為系統開發提供了良好的硬件平臺。
2.2 攝像頭模塊的選型與連接
文中采用的是動態視頻形式的監控方式。選用的是網眼V2000攝像頭,其圖像傳感器和數字信號處理芯片為Omnivision公司的OV7620和OV511它的成像速度快、圖片質量高、成本低,具有良好的通用性。其采用USB接口,不需要視頻卡,可即插即用,使用方使,圖像精晰連貫,馬賽克比率低。為視頻的良好錄制提供了可靠的硬件基礎。網眼V2000攝像頭通過其USB接口直接與CPU上集成的USBHost接口相連。
OV7620是一款高集成度、高分辨率的彩色圖像傳感器。其分辨率為640x480,傳輸速率可達30幀/秒。OV7620的控制采用SCCB(Serial Camera Control Bus)協議,可利用其SCCB(Serial Camera Control Bus)接口完成對它的有關設置和讀取圖像數據。
ov511是攝像頭的主控芯片,其片內的高性能壓縮引擎可使圖像的壓縮比達到7:1,保證了從圖像傳感器到主控制器的快速圖像傳輸。
2.3 GPS模塊的選型與連接
本系統的GPS模塊采用的是HOLUX的GB-87模塊。該模塊支持NMEA0183協議,支持V3.3-V5.5電壓輸入,TTL接口電平,波特率可置。在本系統中,GR-87模塊通過6PIN排線與主板相連,1腳為電源輸入腳,接5 V電源,2、3腳為GPS模塊的數據接收和發送,5腳接地。工作時,GPS模塊串口2與主控制器S3C2440進行通信,通過設置模塊定時輸出GPS定位數據,由主控制器對GPS數據進行處理,提取出經緯度,時間等有用信息,為自動報站及正點考核提供可靠數據,保證報站及正點考核功能的實現。
2.4 3G模塊的選型與連接
根據無線接口技術的不同,現有3G技術可以分為聯通的WCDMA技術,電信的CDMA2000技術和移動的TD-SCDMA技術。考慮到傳輸帶寬、網絡穩定性、實用性等因素,本系統采用電信CDMA2000作為無線網絡傳輸,采用中興公司的MC8630模塊作為視頻數據傳輸模塊。MC8630模塊具有語音、短信、數據業務和GPS等功能,工作頻段為800MHz,通過雙天線接收分集技術和均衡技術,上行速率最高可達3.1 Mbit/s下行速率最高可達3.1 Mbit/s.可以通過USB接口將MC8630模塊連接到MIN2440(S3C2440為主芯片的開發板)處理器上,實現封裝后的視頻數據傳輸。
3 系統軟件設計
目前常見的嵌入式操作系統主要有WinCE、Linux、Vxworks等幾種。其中Linux操作系統的源碼完全開放。由于其自身具有高效穩定、網絡資源豐富、內核小、執行速度快,可移植性好等優點,被廣泛應用于嵌入式系統領域。所以,選擇嵌入式Linux操作系統作為本系統的軟件開發平臺。
在軟件設計方面,首先需要在單片機和PC機之間建立交叉編譯環境,用來編譯引導程序和Linux內核。然后完成引導程序Bootloa der的移植;配置和編譯Linux內核;制作根文件系統以及底層驅動程序。最后,通過編寫上層應用程序完成圖像采集、GPS信息采集、3G傳輸等功能。下面幾節詳細的介紹了幾個主要程序的設計思想。
3.1 圖像采集程序
在視頻采集方面,本文采用的攝像頭是網眼V2000,它是一款是以ov511為主控芯片的攝像頭。選用它的原因是由于Linux內核自帶ov511驅動,所以不用再自己編寫攝像頭的驅動程序,只需在定制內核的時候選中即可。為開發節省了時間。
當Linux系統正常啟動后,插上V2000攝像頭,如果成功加載驅動,將為攝像頭在/dev/v41/目錄下創建設備文件device0,上層應用程序即可通過此設備文件訪問攝像頭,實現拍攝圖像的功能。嵌入式系統平臺已搭建成功,要實現實時地獲取圖像,就需要利用V4L(Vidio For Linux)編程接口實現圖像采集程序了。考慮到攝像頭采集的640x480的RGB圖像數據量較大,這里用圖像壓縮函數put_image_jpeg將圖像轉化為JPEG格式,這樣存儲時就減少了占用的NandFlash空間,同時通過3G網絡回傳監控中心時,也減少了傳輸費用和確保傳送成功。
3.2 GPS解析程序
GPS接收機HOLUX的GR-87模塊輸出數據格式符合NMEA.183標準。NMEA.0183協議是由美國國家海洋電子協會制定的一種串行通信的數據協議,所有輸入輸出信息均為一行ASCII字符。它的一條消息稱為語句(Sentence),每條語句都以“$”開始,以回車換行符(《CR》《LF》)結束,中間是用逗號分隔的若干個域。
由于此GPS模塊設置信息掉電丟失,在每次系統啟動時均要對該GPS模塊進行初始化。將模塊設置成每秒鐘輸出一次GPS信息。系統啟動后,模塊接收GPS信息,然后解析出GPS信息,根據解析出來的經緯度信息與數據區中存儲的站點信息比較,計算出實際距離。如果距離到達閥值時,啟動GPS報站中斷。該GPS模塊接收模塊遵循NMEA.0183協議,可以輸出多種格式的數據幀,均以“MYM”開頭。輸出數據采用的是ASCII碼字符,內容包含了緯度、經度、速度、日期、航向及衛星狀況等信息。該系統所使用的僅限于$GPRMC定位數據幀格式。系統啟動后,通過串口對GPS模塊進行設置,由于系統對實時性要求不高,將GPS設置為每秒鐘輸出一次RMC數據。提取GPRMC語句的思路是設置一個數據緩沖區,把接收到的GPS數據都放入這個緩沖區,當緩沖區滿了的時侯就在緩沖區中查找是否接受到GPRMC定位語句,如果沒有接收到則重新接GPS數據。如果找到GPRMC定位語句則還要判斷該語句在緩沖區中的位置離緩沖區的最大字節數是否大于62個字節(因為本程序中需要的GPRMC定位語句所包含的字節數為62),然后通過多程序提取相關經緯度、時間和速度等信息并通過數據處理線程進行相關處理。運行過程如圖3所示。
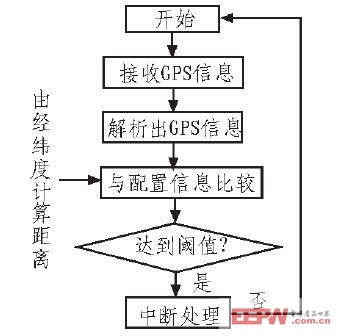
圖3 GPS模塊運行過程
3.3 3G模塊解析程序
MC8630模塊驅動可以通過驅動源碼交叉編譯生成。MC8630模塊的加載和撥號連接的過MC8630模塊驅動可以通過驅動源碼交叉編譯生成。MC8630模塊的加載和撥號連接的過程如下:
1)在編譯前首先要確認編譯驅動和編譯內核的編譯環境相同,也就是需要相同版本號的交叉編譯工具(本系統Linux版本號為2.6);
2)修改驅動源碼Makefde文件,包括添加內核源碼目錄和編譯工具;
3)Make編譯之后,生成ztemt.ko;
4)insmod ztemt.ko,生成4個設備節點/dev/ttyUSB0-ttyUSB3;
5)mknod/dev/ttyUSB0 c 188 0,創建設備節點;
6)編寫Linux下撥號腳本、chat配置文件和賬號密碼配置文件;
7)添加內核選項,編譯支持PPP協議的內核;
8)pppd call evdo撥號連接,ifconfig查詢網絡是否連接;
9)ppp-off中斷連接。
4 結束語
本系統設計的智能公交終端采用先進的3G/GPS技術,通過對公交車輛運行時的信息的采集、傳輸和處理,實現了對公交運營車輛的實時監控和調度,迅速調整公交車輛的運行狀況,提高車輛工作的效率,使公交資源實現最佳利用和分配,達到公交的智能化。







評論