通信電源監控系統模擬量采集模塊的設計

通信電源通常被稱為通信系統的心臟,其工作不正常,將會造成通信系統故障,甚至導致整個系統癱瘓。美國APC公司的一項調查結果表明,大約有75%以上的通信系統故障都是由于電源設備故障或者是電源設備不符和技術條件而引起的。同時隨著通信電源向小型化、模塊化發展、供電方式由集中供電向分散供電轉變,以往的人工監控模式難以適應,從而使得可靠性更加難以保障。為此,我們研制了一套本地用通信電源監控系統,該系統采用模塊化、通用化設計,從而具有較高商業價值和研究意義。
按照模塊化的要求,系統共分為微處理器及外設模塊、模擬量采集模塊、開關量采集模塊、控制量輸出模塊、人機接口模塊、聲光報警模塊、通信模塊以及輔助電源模塊。在本地用通信電源監控系統中,模擬量采集模塊設計得好壞將直接影響上位機乃至整個監控系統的性能。本文詳細介紹了這套具有兩級集散式系統結構的本地用通信電源集中監控系統中模擬量采集模塊的設計。
2 模擬量采集模塊的設計
模擬量采集模塊的設計主要包括信號預調理電路設計、量程在線轉換電路設計以及模數轉換主電路的設計。
2.1信號預調理電路
信號預調理電路的作用在于將不同范圍的電壓、電流信號轉換為模擬開關和模數轉換器所要求范圍的電壓信號。針對不同的信號必須采用相應的預調理電路,圖1(a)~(d)分別給出了交流電壓、電流與直流電壓、電流信號的預調理電路。

其中交流電壓、電流信號調理部分均采用了電流型的互感器,被測的電壓信號通過PT和CT后轉變為毫安級的小電流信號,由取樣電阻和濾波電路轉換成相應的電壓后送入A/D轉換器。直流電壓的調理電路采用了帶負反饋的光隔放大電路,主要由兩個普通光耦、兩個運放以及外圍阻容元件實現。兩個光耦中,一個用作輸出,另一個用作反饋以補償發光二極管時間、溫度特性的非線性。直流電流的調理采用了霍爾傳感器,同時為了調整方便,將霍爾傳感器的輸出經過電阻分壓以后,通過兩級反向放大后送入A/D轉換器。
2.2量程在線轉換電路
在通信電源監控系統中,由于所要處理的信號十分復雜,電平高低相差很大。因此,如何實現測量量程的在線轉換,一直是人們所關注的問題。通常的轉換方法是采用程控增益放大器,或者是多路輸入的形式,這必然以增加電路的復雜性和降低可靠性作為代價。本系統中采用了數字電位計X9241來實現測量量程的在線轉換。XICOR公司的X9241內部集成了四個非易失性 E2POT。其中每一個E2POT包含有63個電阻單元,一個滑動端計數寄存器(WCR)和四個可以由用戶讀出和寫入的8位數據寄存器。滑動端計數寄存器的內容用來控制滑動端在電阻陣列中的位置,并且可以和數據寄存器之間進行雙向的數據傳輸。其具體的通信規約和時序可參見參考文獻[1]。
由于本系統所采用的主處理器MC68332沒有I2C接口部件,與X9241的互聯很不方便。但是通過時序分析發現,可以通過通用I/O總線和一個定時器來模擬I2C總線的功能,即采用處理器的兩根口線分別作為SDA和SCL總線,通過內部定時器產生所需要的時鐘。具體電路連接電路如圖2所示。
 |
| 圖2 測量量程在線轉換電路 |
從理論上講,利用數字電位計可以實現任意量程的轉換。但由于模數轉換器精度的限制以及通信電源監控系統高實時性的要求,選取過多的轉換點反而會收到事倍功半的效果。通過試驗發現,只需要1:1,1:2,1:5,1:10,1:20,和1:50六種量程就可以保證輸入信號在模數轉換器的2/3量程附近,因此,在這里巧妙的利用了滑動端計數寄存器和數據寄存器之間的雙向數據傳輸功能,實現上述六種量程在線轉換。具體的實現方法是:在兩個E2POT的R0中存儲值為01H,由于上電復位時滑動端計數寄存器會自動裝入R0中的值,因此初始化時,放大器為一跟隨器,當需要測量微弱電流時,根據初次采集得到的值,與事先設定的參考值進行比較,選擇合適的量程進行放大后重新采集。從第六章的實驗結果可以看出,在采用這一技術之后,數據采集的精度有了較大的提高。但同時在試驗中也發現,這一電路有時會在輸出端產生振蕩,造成輸出波形失真,解決方法是在放大器輸入和反饋端串聯兩個電阻,增加其到輸入端的衰減通道。
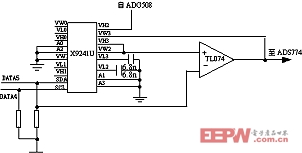
2.3模數轉換主電路
在模數轉換部分,根據系統采樣精度和速度的要求,我們采用了AD公司的高速模數轉換ADS774。它是一種采用CMOS技術的低功耗、高采樣速度的12 位模數轉換器,從模擬量輸入到轉換結束的時間為8.5us,采樣頻率可達117kHz,而且具有內部的采樣和保持電路,其自身就是一個完備的數據采集系統。ADS774的具體工作時序和工作原理可參見文獻[1],在此不再贅述。模數轉換的主電路如圖3所示。
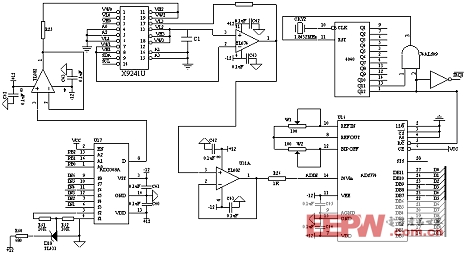 |
圖3 模數轉換的主電路 本文引用地址:http://www.j9360.com/article/258961.htm |
系統采用了硬件直接控制模數轉換器轉換頻率的策略,其目的是為了確保同步采樣的精確實現,同時為實時多任務操作系統的實現提供時間基準。其實現過程如下:首先由1.8432MHz的鐘振提供精確的方波信號,該方波信號經過CD4040計數器后輸出兩路分頻信號,一路為Q12輸出,另一路為Q11輸出。然后將這兩路信號相與后的輸出接至CD4040的復位端,從而在CD4040的Q12引腳即可得到一個3072分頻的矩形波(占空比為1/2),將其作為模數轉換器的控制頻率,同時送入單片機的外部中斷。最后輸出的 信號頻率為1.8432×106÷3072=600Hz,即周期為1.667ms,對于工頻信號來說,等效于每個周期采樣12個點。
模數轉換電路的工作過程如下:由采樣頻率控制電路產生的600Hz矩形波信號被送至模數轉換器的
腳,由它來精確控制A/D轉換器的工作頻率。主處理器通過檢測ADS774的STATUS的電平來判斷模數轉換是否結束,當STATUS輸出低電平時,表明正在進行轉換,當STATUS輸出高電平時,表明轉換過程已經結束,可以讀取數據。
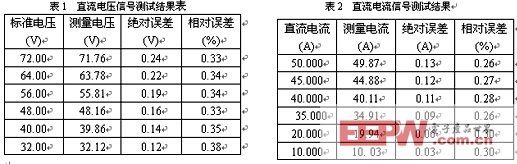
3 實驗結果及結論
以直流電壓和直流電流信號測試結果為例,給出測試結果如表1、2所示。
參考文獻:
[1] 陳汝全.電子技術常用器件應用手冊[J].北京:機械工業出版社,2001.
[2] YDN023—1996.通信電源和空調集中監控系統技術要求及通信協議[S].
[3] 劉希禹.通信電源與空調及環境集中監控系統[M].北京:人民郵電出版社,1999.






評論