基于KAI-01050 CCD功率電路的驅動方案

本方案對部分重點電路進行了仿真驗證,并通過測試驗證了本方案所設計的驅動電路各部分功率驅動電路滿足KAI-01050 CCD的功率驅動要求,在四通道輸出模式下,幀頻可達120 f/s,充分驗證了該方案的合理性。
此CCD功率驅動電路的難點包括40 MHz高速水平轉移和復位時鐘驅動、三電平階梯波形垂直轉移時鐘V1和高壓脈沖電子快門信號驅動設計。利用高速時鐘驅動器ISL55110和鉗位電路實現了高速水平轉移時鐘的驅動;利用兩個高速MOSFET驅動器組合的方案,實現了三電平階梯波形垂直轉移時鐘V1的驅動;利用兩個互補高速三極管輪流開關工作實現了高壓脈沖電子快門信號的驅動。
電荷耦合器件(CCD)是一種光電轉換式圖像傳感器,它將光信號直接轉換成電信號。由于CCD具有集成度高、低功耗、低噪聲、測量精度高、壽命長等諸多優點,因此,在精密測量、非接觸無損檢測、文件掃描與航空遙感等領域中得到了廣泛的應用。CCD的功率驅動是CCD應用的關鍵技術之一,只有驅動脈沖的相位和電壓幅值滿足CCD的要求,CCD才能正常的完成光電轉換功能,輸出滿足應用需求的信號。時序極為嚴格的多路驅動信號是CCD正常工作的條件,由于CCD是容性負載,因此設計具有一定帶負載能力驅動信號成了CCD相機系統設計中的重點和難點。
KAI-01050是KODAK公司生產的一款高速面陣行間轉移CCD,其驅動電路不僅有高達40 MHz的高速水平轉移信號,還有三電平階梯的垂直轉移信號和高壓脈沖的電子快門信號。這些都屬于本文論述的功率驅動電路設計的重點和難點。
本文圍繞CCD KAI-01050進行功率驅動電路設計,對各部分的設計進行原理分析,并對其中部分電路進行仿真驗證,最后通過試驗驗證設計的可行性。
1 KAI-01050面陣CCD
KAI-01050是KODAK公司生產的一款高速面陣行間轉移CCD,1 024(V)×1 024(H)像素,像元大小為5.5μm×5.5μm,其模擬輸出可選擇單通道、雙通道和四通道輸出模式。其水平轉移時鐘最高頻率為40 MHz,此時,單通道輸出幀頻最高可達30 f/s,雙通道輸出幀頻最高可達60 f/s,四通道輸出幀頻最高可達120 f/s.
本文的論述的相機要求相機輸出幀頻為120 f/s,因此要求CCD工作在最高水平轉移時鐘率40 MHz.本CCD的驅動信號電壓幅值要求和等效電容值如表1所示。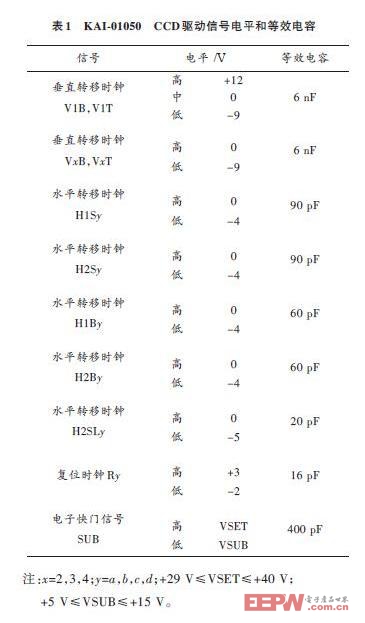
由表1可知,KAI-01050的驅動信號種類比較多,主要包括行轉移(垂直轉移)時鐘、像素讀出(水平轉移)時鐘、復位時鐘和電子快門信號。其功率驅動電路設計重點和難點如下:
(1)垂直轉移時鐘V1為三電平階梯信號;
(2)水平轉移和復位時鐘為40 MHz高速信號;
(3)電子快門信號為的峰值達29~40 V的高壓脈沖信號。
2功率驅動電路設計
CCD驅動電路原理框圖如圖1所示。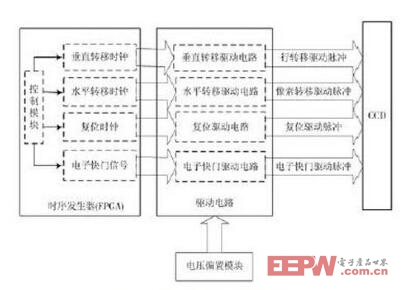
圖1 CCD驅動電路原理框圖
FPGA產生垂直轉移時鐘、水平轉移時鐘、復位時鐘和電子快門信號。由于FPGA產生的是3.3 V幅度的信號,需要經過功率驅動電路,轉換成符合CCD要求的驅動脈沖信號,進而驅動CCD正常工作。本文重點論述其中的功率驅動電路部分。
2.1電壓偏置模塊
功率驅動電路所需電壓如表1所示,根據電壓需求設計的電壓偏置電路原理框圖如圖2所示。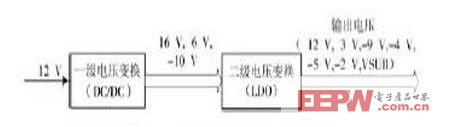
圖2 電壓偏置電路原理框圖
系統采用+12 V電源供電,電壓偏置電路首先使用開關電源芯片(DC/DC)進行一級電壓轉換。又由于DC/DC輸出電壓的紋波和開關噪聲較大,不能直接給電路供電,所以使用LDO芯片進行二次電壓變換,最終獲得穩定、低噪聲的電壓。
2.2水平轉移和復位驅動電路
由以上可知,欲使CCD工作在最高幀頻120 f/s,水平轉移和復位時鐘的頻率需要工作在40 MHz.每個驅動信號功率需求如式(1)所示:
式中:C為CCD時鐘管腳的等效電容;V為信號的擺幅;f為工作頻率。由式(1)可知,頻率越高,需要的功率越大。
時鐘信號不僅對高低電平電壓有要求,上升沿和下降沿時間也必須要在指定的范圍內。要得到指定的上升時間,就必須提供相應大小的驅動電流。對CCD功率驅動電路的要求是在較大電壓擺幅情況下在快速的變化沿時能夠提供足夠大的瞬態驅動電流。
由于CCD為容性負載,由下面電容模型的公式可以算出驅動器需要提供的瞬態電流。
上面的計算中定義上升或下降沿的時間對應電平幅度的10%~90%.設邊沿變化為線性的,對于水平轉移時鐘,電壓幅度為4 V,負載電容取最大值90 pF,對于40 MHz信號,上升或下降沿的最長時間按5 ns計算,那么在邊沿變化處會產生的電流為57.6 mA;對于復位時鐘,電壓幅度為5 V,負載電容取最大值16 pF,對于40 MHz復位信號,占空比取1∶4,上升或下降沿的時間按3 ns計算,那么在邊沿變化處會產生的電流為21.3 mA.
本文選用InterSIL公司高速驅動器ISL55110和二極管鉗位電路進行復位和水平轉移時鐘的驅動電路。此驅動器最高可提供3.5 A的驅動電流,在100 pF的負載電容下,電壓擺幅為12 V時,上升時間僅為1.4 ns,下降時間僅為1.2 ns.完全滿足水平轉移和復位時鐘的功率驅動要求。
2.3垂直轉移驅動電路
垂直轉移信號分為兩種:
(1)正常的兩電平階梯波形的V2T,V2B,V3T,V3B,V4T和V4B,高電平為GND,低電平為-9 V;
(2)三電平階梯波形的V1T和V1B,高電平為12 V,中間電平為GND,低電平為-9 V.
第一種驅動比較簡單,利用驅動器和鉗位電路的組合就可實現,本文不在贅述。本節主要介紹第二種電路的驅動。介紹了利用驅動器組合來實現三電平階梯波形驅動,即把三電平階梯脈沖分為上下兩個信號,分別利用兩個驅動器進行驅動,利用其中一個驅動器的輸出控制另一個驅動的高電平電源管腳,從而實現三電平階梯脈沖的驅動。
本文也選用驅動器組合的方法來實現,由表1可知,KAI-01050 CCD的三電階梯脈沖驅動的高低電平的差為21 V,如果選用普通的CCD驅動器,很難產生21 V這么大壓差的驅動。
本文選用IXYS公司生產的高速MOSFET驅動器IXDD404,它是一款雙通道超快MOSFET驅動器,每通道最高可以輸出峰值為4 A的電流,高容性負載驅動能力,低傳輸延時時間,在負載為1 800 pF時,上升/下降時間小于15 ns,4.5~35 V的寬電壓操作范圍。這些特點滿足KAI-01050三電平階梯脈沖驅動電路對驅動器的需求。其原理圖如圖3所示。
將三電平信號V1分解為V1HM和V1ML信號,分別經過2個IXDD404驅動器U1和U2進行驅動。V1ML經U1驅動后的信號控制U2的電源輸入管腳,從而兩個驅動器的組合產生所需的三電平階梯波形信號。注意U2的GND腳,接了-9 V,此處只是為U2提供0電平基準,并不是必須接GND.U2前端二極管鉗位電路是將邏輯電平輸入調整為U2的輸入范圍。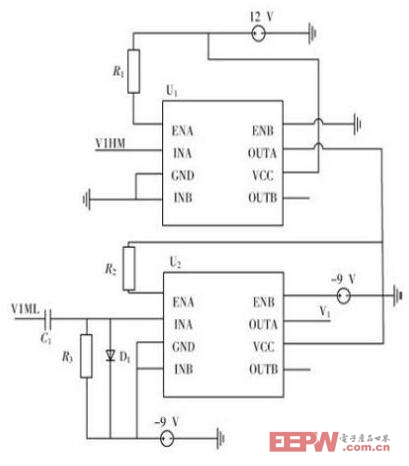
圖3 三電平階梯脈沖功率驅動原理圖




評論