基于CAN總線和DSP的雙層數據采集系統

1 引言
本文引用地址:http://www.j9360.com/article/257569.htmCAN(Controller Area Network)即控制器區(qū)域網,CAN總線是由德國BOSCH公司為實現汽車測量和執(zhí)行部件之間的數據通訊而設計的、支持分布式控制及實時控制的串行通訊網絡。CAN BUS現場總線已由ISO/TC22 技術委員會批準為國際標準IOS11898(通訊速率小于1Mbps)和ISO11519(通訊速率小于125kbps)。CAN總線開始主要應用于自動化電子領域的汽車發(fā)動機部件、傳感器、抗滑系統等應用中,但隨著CAN的應用普及,CAN總線的實時性以及抗干擾能力強等優(yōu)點也逐步為航天領域所認可[1]。
本文將對CAN總線在航天領域應用情況進行介紹,并在CAN總線和DSP技術研究的基礎上,設計了基于CAN總線和DSP的雙層數據采集系統。文中將重點介紹雙層數據采集系統的結構組成以及CAN總線接口的設計。
2 CAN總線在航天領域的應用狀況
CAN總線開始主要應用于自動化電子領域的汽車發(fā)動機部件、傳感器、抗滑系統等應用中,但隨著CAN的應用普及,其應用范圍已不局限于汽車行業(yè),正在逐步為航天領域所認可。1995年SSTL(Surrey大學衛(wèi)星技術公司)將CAN作為星載遙測/遙控信道,隨之SSTL開發(fā)了基于CAN的分布式解決方案。至今SSTL已經在UoSAT-12,SNAP-1,AISAT-1,UKDMC,NigeriaSAT-1,BilSAT-1 等6顆LEO衛(wèi)星中應用了CAN總線網絡,用于實現星載計算機與其他任務節(jié)點之間的通信;ESA在SMART-1上也將CAN作為系統總線和有效載荷總線,實現數據交換和控制命令的傳送。
ESA開展的CAN技術研究表明以差分信號傳輸的高速串行總線用于星載設備之間的數據傳輸能保證通信的及時性,有利于降低星載設備的功耗,有助于獲得低噪聲、抗電磁干擾性強、EMI低、信號不受電源開關狀態(tài)變化影響等優(yōu)勢,具有良好的航天應用前景。隨著航天電子技術的發(fā)展,航天電子設備綜合化程度越來越高,設備之間需要交互的信息量越來越大,CAN總線技術已經開始在航天電子領域得到越來越廣泛的運用[3]。
在國內,CAN總線技術已在小衛(wèi)星中得到了實際的應用。隨著航天信息一體化技術的發(fā)展,CAN總線將廣泛應用于航天器的測量、控制等系統。CAN接口的采用將大大簡化了測量系統的電纜網,提高航天器的飛行可靠性。
3 雙層數據采集系統的結構及功能
雙層數據采集系統的整體結構如圖1所示。
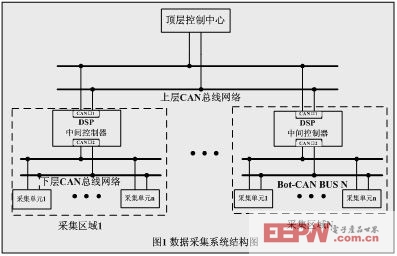
雙層數據采集系統由采集單元、DSP中間控制器、頂層控制中心等組成,它的組成結構如圖1所示。本數據采集系統可同時實現對多區(qū)域、多單元的數據采集和信息管理控制,采用分級、區(qū)域控制的優(yōu)化控制思想,采用DSP中間控制器作為各采集區(qū)域的核心控制器,實現上下層間的數據交換。
采集單元是數據采集系統構成的基礎與關鍵,它直接與參數采集執(zhí)行機構相連接,實現對現場參數的采集,包括電壓、電流、溫度、轉速等。采集單元自身具有微控制器和存儲器,既作為系統的重要組成部分,參與系統功能的實現,也可以它作為獨立單元來完成數據采集功能,即在系統出現通信等故障的情況下,采集單元仍可以獨立實現數據采集功能,并進行數據存儲,提高了系統的可靠性。采集單元通過標準的CAN總線接口,連接到Bot-CAN總線上,實現對現場數據的采集和傳輸。
DSP中間控制器是整個采集系統的通信樞紐,提供上層網絡和下層網絡通訊的雙接口。一方面通過上層網絡(Top-CAN BUS)與頂層控制中心進行通訊,另一方面通過低層網絡(Bot-CAN BUS)與各個采集單元進行通訊。DSP中間控制器是數據采集的區(qū)域控制器,實現對本區(qū)域數據的收集、處理,并通過CAN總線與頂層控制中心進行數據通訊,實現頂層控制中心對各個數據采集區(qū)域和采集單元的信息收集和控制。











評論