DIY機器人:實現多功能探測,提供功能解析,硬件實現,軟件流程

1 項目概述
1.1 引言
從機器人誕生到上世紀80年代初,機器人技術經歷了一個長期緩慢的發展過程。到了 90年代,隨著計算機技術、微電子技術、網絡技術等的快速發展,以及人類活動領域的不斷擴大,機器人應用也開始從制造領域向非制造領域發展。機器人技術的發展也是人類自身發展的必然結果,在人類不斷探測自然、認識自然、改造自然過程中,實現人們對比較惡劣或是不可達環境的探測、認識,而探測機器人正是因此而出現的。
1.2 項目背景/選題動機
探測機器人的設計與推出是多方面原因促成的,近年來隨著人們生活水平及科學技術水平的不斷提高,使得人們逐漸開始關注那些比較惡劣的或是不可達的環境,而這類地方是人類不能夠直接接觸的,需通過探測機器人先預先進行探測,然后將探測后的數據傳回,人類通過分析這類數據而清楚的認識這類環境。另外加之地震等方面的自然災害原因,每次災后,迫切需要一種探測工具能夠探測出災區的具體環境狀況,以方便救援人員按照探測機器人傳回的具體數據及時高效的進行抗震救災,基于此原因,探測機器人顯得尤為需要。
2 需求分析
2.1 功能要求
(1)能夠翻越障礙物;
(2) 能實現視頻采集;
(3) 能夠進行無線電通信;
(4) 能夠對周圍環境參數進行采集,分析;
(5) 能夠實現遠程控制;
(6) 能夠實現語音通信;
(7) 能夠實現現場照明功能。
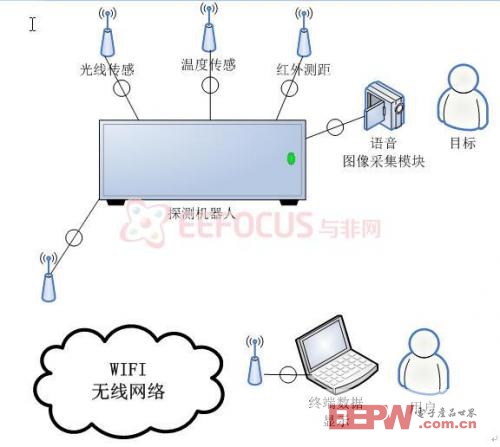
圖1 系統架構
2.2 性能要求
(1)具有在廢墟上行走,深入廢墟以及從廢墟中返回的能力;
(2)具有對視頻進行處理壓縮的能力,以及在PC機上能將傳回的視頻進行解壓縮,還原原始視頻;
(3)具有實時將機器人采集到的視頻、環境信號、語音信號等傳回PC機,同時能夠實時的將PC機發出的控制命令和語音信號發送至機器人;
(4)具有低功耗的特點;
3 方案設計
3.1 系統功能實現原理
(1)圖像采集處理及傳輸模塊
本模塊采用TMS320VC5509A芯片作為模塊處理器,模塊主要完成圖像的采集及圖像的JPEG_LS壓縮,并將壓縮后的圖像數據傳輸至基于AVR32的開發板EVK1100上進行無線傳輸至PC機上顯示。圖像的采集是通過圖像解碼芯片OV9650 將CMOS 攝像頭的視頻信號轉換成數字碼流,并傳輸給DSP 進行壓縮處理。由于圖像采集模塊的數字碼流輸出速度快,而DSP 對外圍設備的數據讀寫較慢, 為匹配數據的傳輸速度, 在圖像采集端加入CPLD 進行采集控制。在圖像采集時,由CPLD 將采集的圖像數據存儲到高速緩沖區中, 利用DSP 的DMA 將圖像數據傳輸到DSP 的外部SDRAM 中,以此提高系統的工作效率。同時為了及時把圖像傳輸至PC機,我們在初始化圖像解碼芯片OV9650時,將圖像設為黑白。
(2)溫度采集
為了了解機器人和被困者周圍環境的溫度,在機器人的頭部裝有一個溫度傳感器,能夠實時對周圍環境溫度進行采集,并送至AVR32進行處理后發送至PC顯示。
(3)距離采集
為了讓機器人能夠發現障礙物,在機器人的頭部裝有一個超聲波距離傳感器,能夠對機器人前方的障礙物進行實時的采集,并將數據送至AVR32進行分析、處理,當機器人前方有障礙物時,機器人啟動相應的模塊進行處理,翻越障礙物。
(4)光線采集與照明
為了能讓我們能更能好的觀察機器人的周圍的環境,以及了解被困者現在的具體位置和身體狀態,在機器人的頭部裝有一個光線傳感器和一個照明裝置,機器人實時的對周圍環境的光線進行采集,并將采集到的數據送至AVR32,再由AVR32處理、顯示,當周圍的能見度不能達到 時,機器人自動啟動照明裝置。
(5)無線控制模塊
PC機與機器人之間采用WIFI模塊進行無線傳輸。當AVR32單片機處理好數據后,調用WIFI模塊,將數據發送至PC,PC機將送來的數據進行一定的處理后通過畫面顯示出來。當PC機需要對機器人進行控制時,PC機將控制指令通過WIFI模塊發送至AVR32,AVR32將送來的數據進行分析后對各個電機及相應的端口進行控制。
(6)翻越障礙物
機器人采用履帶式設計,能夠翻越較小的障礙物;同時為機器人添加的機械手臂能夠讓它在較大的障礙物面前也能游刃有余。











評論