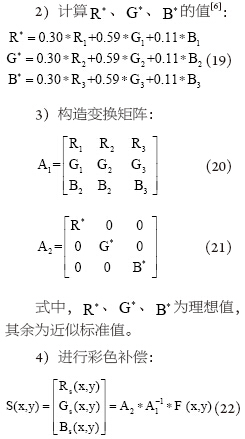
基于室內環境識別的移動機器人視覺導航 作者:劉洲洲 時間:2014-07-25 來源:電子產品世界 加入技術交流群 掃碼加入和技術大咖面對面交流海量資料庫查詢 收藏 <a target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=88&cb=INSERT_RANDOM_NUMBER_HERE&n=a635e61e' border='0' alt='' /></a> 編者按:道路檢測是視覺導航系統中最核心的部分之一。本文主要研究室內環境下的視覺導航。選取顏色作為分析對象,分析了RGB和HSV顏色空間模型及轉換關系,用3×3模板進行中值平滑濾波,介紹了大津閾值分割法和改進的閾值迭代法,并通過彩色補償原理進行彩色補償。最后實驗仿真驗證其可行性。 <a target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=87&cb=INSERT_RANDOM_NUMBER_HERE&n=a576c0a2' border='0' alt='' /></a> 3.2.3 彩色補償原理的應用本文引用地址:http://www.j9360.com/article/256089.htm 1)找到圖像上純紅、綠、藍的點,設: 對圖像進行障礙物檢測,結果如下圖5。 上一頁 1 2 3 4 5 6 下一頁














評論