單通道通訊模式異步流水線控制器

摘 要:為了實現異步電路在實際應用中的低功耗、高性能特性,提出了一種基于單通道通訊協議的高速異步流水線控制單元和一種使用Muller C單元的高魯棒性的QDI(quasidelay insensitive)異步流水線控制單元。第1種異步流水線控制單元采用獨立的正反向響應電路,使得比近期提出的超高速異步流水線控制單元GasP電路的正向響應減小了50%的信號翻轉。該電路使用TSMC 0.25μmCMOS工藝實現,HSPICE模擬結果表明與GasP電路相比正向響應時間減少38.1%.可以工作在2.2GHz;第2種控制器與流行的QDI異步控制器STFB(single-track full-buffer)電路相比.以較少的面積代價,實現了時序驗證上的極大簡化。
關鍵詞:大規模集成電路;異步電路;異步流水線;準延時無關電路
異步電路因其具有低功耗、高性能和低電磁干擾的特性,正受到越來越多的關注。異步流水線是異步電路實現的主要形式,從而得到廣泛研究,實用的異步流水線結構也被不斷提出,例如在文中提出的超高速異步流水線控制單元GasP電路,在文中提出的準延時無關QDI異步流水線控制單元WCHB(weak condition half buffer)、PCHB(precharged fullbuffer),以及在文中提出的基于單通道通訊協議的QDI異步流水線控制單元STFB。
提出一種基于單通道通訊協議的高速異步流水線控制單元,與文中GasP電路的正向響應需要4次信號轉換相比,該控制單元的正向響應只需要2次信號轉換,從而大大減小了流水線的正向響應時間。同時,為了簡化時序驗證,另一種具有更強魯棒性的QDI異步流水線控制單元被提出,該控制單元很好地解決了STFB控制單元高的功耗和面積消耗問題。
1 GasP電路與STFB電路
典型異步電路系統由一系列相互通訊的模塊組成,在這些模塊之間需要基于異步握手協議的通訊通道來完成數據交換,本文根據通訊通道的延時模型將其分為有限延時通訊通道和準延時無關通訊通道,圖1給出了這兩種類型的通訊通道。
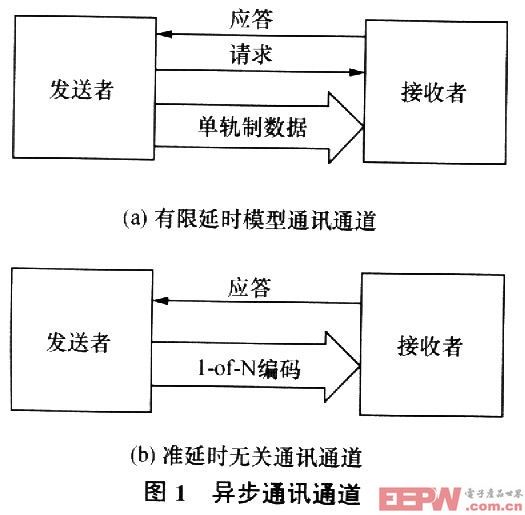
其中圖la中給出的有限延時的通訊通道,由于采用單軌制編碼方式,可以有效的復用現有同步電路單元,并且在很大程度上節約了面積。但是有限延時模型決定了請求信號與數據有效之間存在復雜時序關系,在物理設計時,時序驗證是一項復雜的工作。準延時無關通訊通道如圖lb所示,該通道采用1-of-N的編碼方式,此種編碼使用冗余碼,數據本身包含數據有效信息,不需要請求信號指示數據有效,這樣也就有效避免了請求信號與數據有效信號之間復雜的時序關系。準延時無關通訊通道有效地簡化了時序約束并易于實現異步電路的平均延時,但是,由于其需要檢測數據有效,勢必會引入額外的延時。
與同步電路相比,異步電路需要實現發送者和接收者之間的握手協議,因而會引入額外的延時、功耗以及面積的代價,如何設計有競爭力的控制器實現握手協議是異步電路設計的關鍵。
1.1 GasP電路
GasP電路作為高速異步流水線控制器被提出,圖2給出了GasP電路的基本結構,通過邏輯努力電路優化之后,圖中每一次信號翻轉的延時相等。
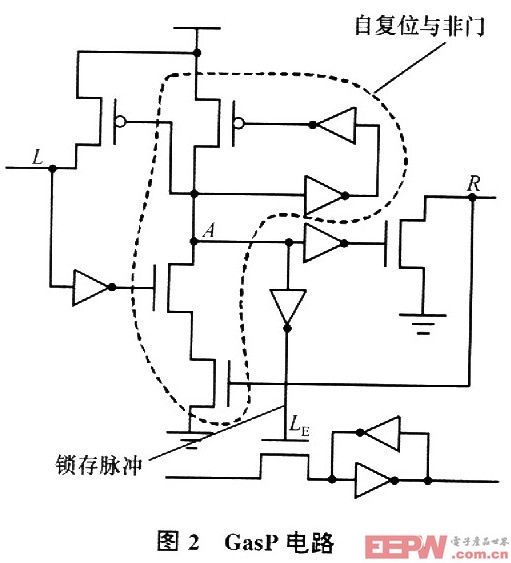
初始化之后,節點L、 R和A均為高電平,當前一級電路準備好數據時,節點L將被設成低電平,此時自復位與非門的輸出發生翻轉,節點A被驅動到低電平,經過一級反相器,節點LE變為高電平,此時數據通過鎖存器傳輸到下一流水級。當節點A電平為高后,節點L通過上拉的PMOS恢復到高電平,經過兩級延時,節點R被驅動成低電平。在A為低電平后兩個門延時,自復位與非門的兩個輸入為低電平,因此,自復位與非門的輸出將自行恢復到高電平。在這一狀態下,如果前一級電路再次將L驅動成低電平,自復位與非門的輸出不會再次發生翻轉,直到后一級電路完成對當前鎖存數據的處理,將R重新設置成高電平。
正向響應時間定義為節點L變低到節點R變低過程中的信號轉換次數。反向響應時間定義為節點R變高到節點L變高過程的信號轉換次數。根據以上定義,GasP電路的正向響應時間為4次信號轉換,而反向響應時間為2次信號轉換。異步流水線的輸入到輸出的響應時間由流水級的正向響應時間決定,因此,Gasp電路獲得高的吞吐率的同時,是以大的響應時間為代價的。當Gasp電路各級門的延時失配時,存在直流電流,從而引入了額外的功耗,并減慢了節點A由低向高的翻轉速度。同時,GasP電路不利于實現準延時無關電路,在電路物理設計時,復雜的時序驗證是不可避免的。
1.2 STFB電路
異步流水線控制器STFB電路由Ferretti M和Beerel P A提出,其電路結構如圖3所示,其采用雙軌制編碼實現準延時無關異步通訊。
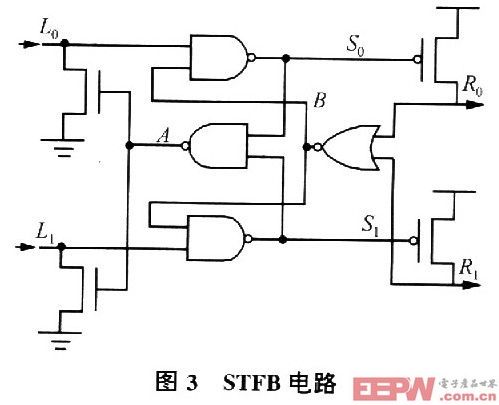
工作過程如下:初始化以后,節點L0、L1、R0、R1以及A均為低電平,節點B為高電平;一旦前一級電路準備好數據,L0和L1其中一個設置成高電平,這里假設L0被前一級電路設置成高電平,這時通過與非門S0節點設置成低電平。當S0為低時,節點A和節點R0被驅動成高。節點A變高以后,L0和L1被重新拉回到低電平,這標志著前一級電路可以發送新的數據。當R0變高以后,B節點由高電平變成低電平,防止S0、S1節點被再次拉高,直到后一級電路處理完Ro、R1上的數據,將R0設置成高電平之后,B節點重新回到高電平,新的數據才允許被再次傳送到下一級。
從圖3不難得出,STFB控制器的正向響應需要2次信號翻轉,而反向響應需要4次信號翻轉,一個周期的信號翻轉次數與GasP電路一樣,都是6次。當一個流水線的輸出受限時,流水級的反向響應將影響其性能,同時在實現寬數據通路的流水線時,STFB電路需要與數據寬度一致的控制器個數,因此在STFB實現時,需要較大的功耗和面積代價。
2 低響應時間特性的異步流水線控制器
圖4給出了基于單通道異步握手協議通訊通道結構,
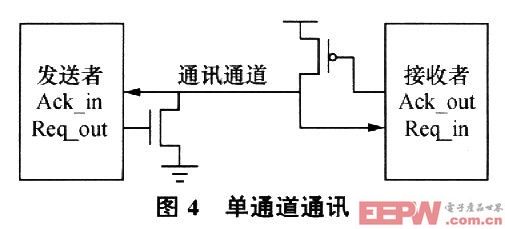
從圖中可以看出,信號Ack_in和Ack_out總是反相的,因此在同一控制器中,從Ack_in到Ack_out需要奇數次反相,從Req_in到Req_out也需要奇數次反相。此外Req_out和Ack_out有效的條件是Req_in為低電平并且Ack_in為高電平,因此Req_in和Ack_in兩個信號在進行與非操作或者或非操作前必須有一個信號需要先做一次反相。在設計控制器時,若由同一電路產生Req_out和Ack_out時,則從Req_in到Req_out或者從Ack_in到Ack_out路徑中必有一條路徑存在3級反相門,也就是說,正向響應或者反向響應需要4次信號轉換(Req_out和Ack_0ut到通訊通道還有一次信號反相)。
為了減小正反向響應信號翻轉的次數,將信號Req_out和Ack_out信號的產生電路分開,圖5就是基于這一思想提出的一種新的具有低響應時間特性的異步流水線控制器。
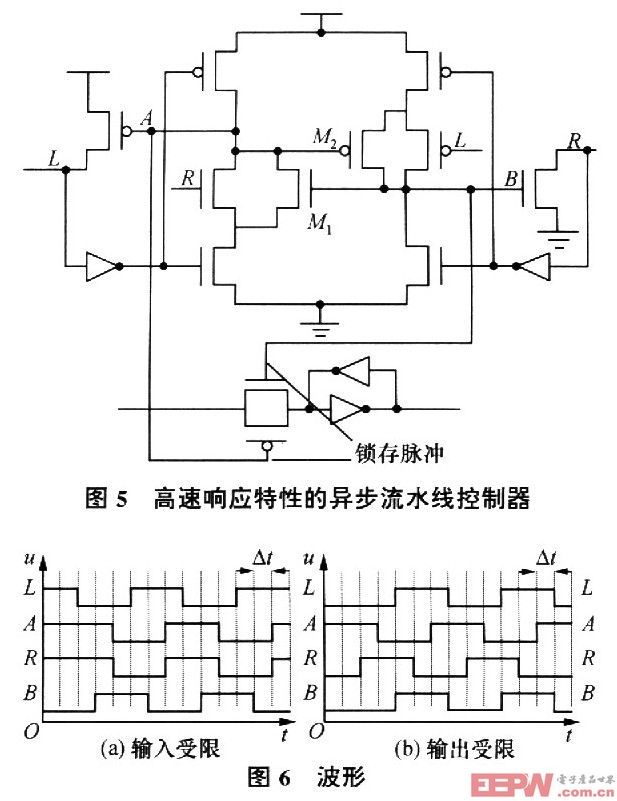
下面具體介紹該控制器的工作過程:在初始狀態時,節點L、R和A均為高電平,節點B為低電平,此時晶體管M1、M2截止。當前一級電路將L節點驅動為低電平時,經過一級門延時,節點B被驅動成高電平,經過兩級門延時節點A被驅動成低電平,節點R被驅動成低電平。在節點A為低以后,L節點通過PMOS管重新被拉成高電平,表示前一級電路可以發送新的數據。當R為低電平后兩個門延時,B節點被重新驅動成低電平,同樣在L為高電平后兩個門延時,A節點重新回到高電平;當A是高電平,B是低電平時,L和R節點浮空,該流水級處于等待前一級的請求信號和后一級的應答信號狀態。圖6a給出了以上描述的輸入受限(即請求信號晚于應答信號)的信號轉換情況,而圖6b是輸出受限(即應答信號晚于請求信號)的信號轉換情況。為了使在輸入受限和輸出受限兩種不同情況下,節點A和

pid控制器相關文章:pid控制器原理








評論