基于μC/OS-II 的激光測距系統設計

0 引言
本文引用地址:http://www.j9360.com/article/246744.htm激光測距系統的最基本原理就是測量激光脈沖在空間傳播的時間間隔,從而獲得被測量的距離。針對相位法激光測距的基本原理與實現方法進行研究,本文結合了嵌入式、差頻測相等相關技術和實時操作系統μC/OS-II 的優點,硬件結構合理,軟件實現方法靈活,滿足了網絡化實時高速信息提取和傳輸的要求。
避免了傳統測距系統中存在著勞動強度大、數據采集慢、數據處理時間長、計算準確度低及數據不能直接輸出到其它系統等問題。本系統實現相對簡單,具有測量精度高、穩定度好、速度快等優點。在生產廠礦、科研學校、計量院所等有著很大的應用空間,具有有很高的實用價值。
1 系統的基本原理
1.1 相位式激光測距原理
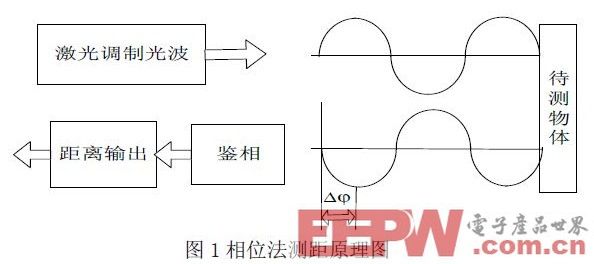
對于連續波的激光測距一般采用相位式測距,主要是指用連續調制的激光波光束照射待測物體,從測量光束往返中產生的相位變化關系換算出激光傳感器與待測目標物體間的距離D.
公式(1) 為相位式測距公式,其中C 為光波在空氣中的傳播速率,φ為調試的激光信號經過反射后而產生的相位差,f 為信號的調制頻率。它可得到優于脈沖式飛行時間測量法的測距精度,但是測距速度慢,結構更為復雜,對于高速運動物體存在多普勒效應。
圖 1 為相位式激光測距原理圖,其中Δφ為信號往返時相位延遲不足2π 的部分,其中φ= 2Nπ + Δφ,N 為激光往返所包含的波長的個數。于是,在給定調制頻率的情況下,距離的測量就變成了對激光往返一次所包含整數個波長數量的測量和不足于一個波長的相位的測量。隨著現代無線電測相技術的發展,相位測量可達很高的精度,所以相位式激光測距也能達到很高的精度。
1.2 差頻測相原理
所謂差頻法測相的原理就是指通過主振頻率與本振頻率的乘法混頻,得到兩個新的頻率的信號分量的疊加,經過低通濾波器后,變成了中低頻信號,由于差頻信號仍保持著原高頻信號相應的相位關系,測量中低頻信號的相位就相當于測量主振信號經往返距離后的相位延遲。這樣可以降低電路復雜度,提高了測距精度。
將這兩路信號與外加的信號U3 = I3 cos(ω1 t +φ3)進行乘法混頻后可得到:

再將新得到的這兩路信號1 W 和2 W 分別通過低通濾波器,濾除其高頻分量,得到包含(ω -ω1 )頻譜分量的低頻信號,并且相應的相位信息 φ1和 φ2仍然保留在濾波后的信號中,而且不會導致相位信息的丟失,然后對這兩路信號進行AD 采樣,再由微處理器通過數字信號處理算法得出相位差Δφ,進而可以計算出發射激光與待測物體之間的距離。
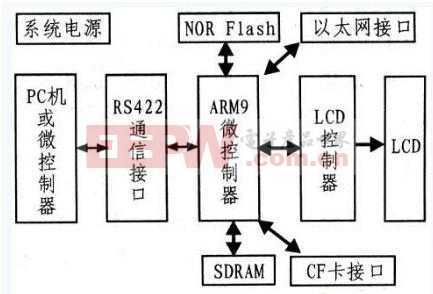
2 系統的硬件結構和工作原理
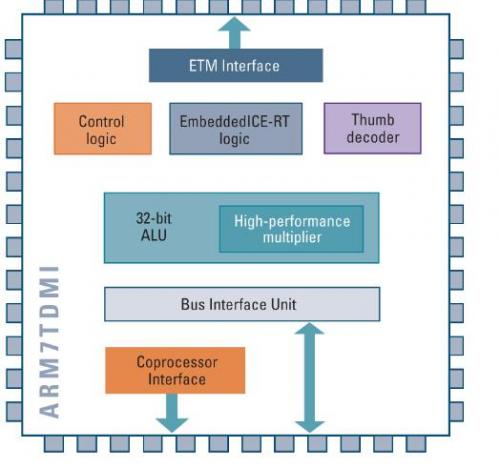
系統的硬件組成如圖2 所示,包括基于ARM9(S3C2440A)處理器模塊、激光調制驅動電路、本振信號發生器、激光發射電路、激光接收電路、混頻濾波電路、液晶顯示模塊、鍵盤輸入模塊等部分組成。S3C2440A 是SAM SUNG 公司推出的一款ARM 9 微控制器,內核是32 bitARM920T,它的系統時鐘是由內部PLL 產生的400MHz CPU 內核工作頻率,同時具有64 MB Flash 及64 MB SDRAM外部存儲器。內部集成SDRAM 和FLASH 控制器,功能接口豐富,是一款高速、低功耗、高性能的新型處理器,可廣泛應用于通信、汽車、工業控制、PDA、醫療等系統的開發。本文系統中采用ARM9核心板作為數據采集控制核心,由它來產生A/D 轉換器的各種控制信號、基本的數據處理等。


評論