基于μC/OS-II 的激光測距系統設計


本文引用地址:http://www.j9360.com/article/246744.htm
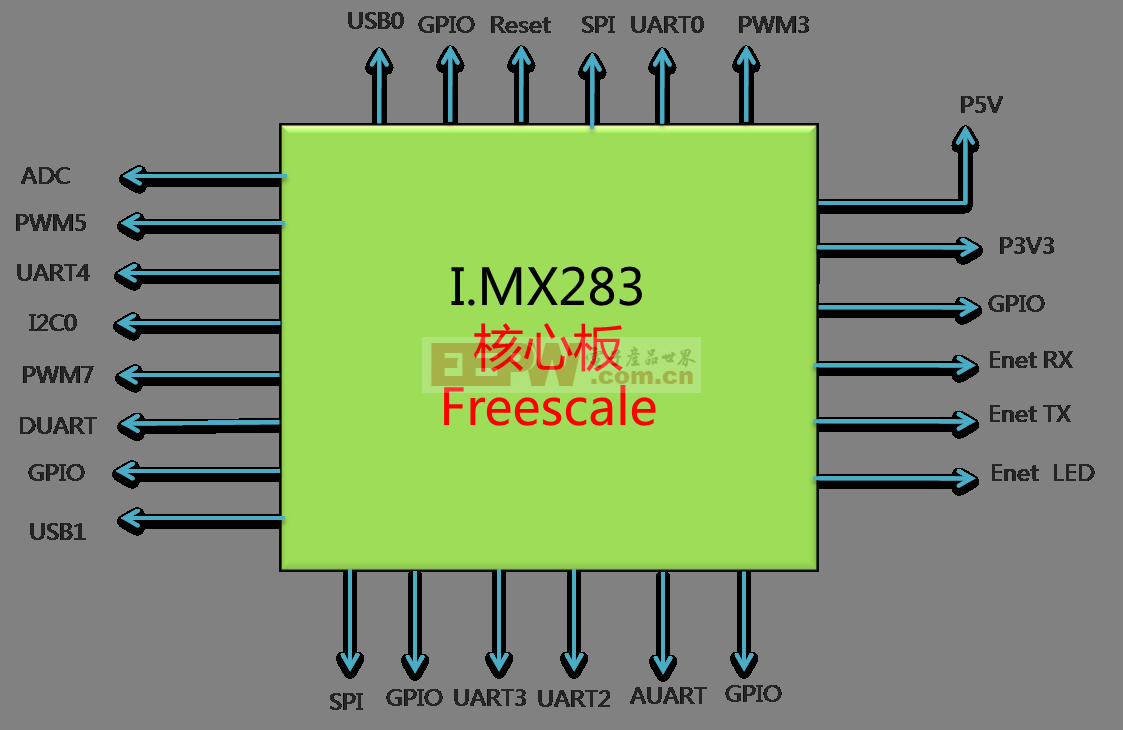
系統的硬件工作原理是: 該系統主要由本振信號發生器、激光的發射電路和接收電路、混頻及濾波電路、處理器與顯示電路等部分組成。本振信號發生器可產生兩個頻率相差1KHz 的正弦信號,通過激光發射電路來調制發射激光的功率,再將發射激光和接收激光分別轉換為相應電信號,然后通過混頻和濾波放大電路將相位差信息轉移到兩個低頻的信號上,最后由ARM 9 處理器采集這兩個低頻信號,并且計算出相位差并轉換為距離,最后由顯示模塊顯示出來。系統外圍電路包括系統時鐘、模數轉換ADC、外部中斷、定時系統、信號捕捉模塊(Capture)、脈寬調制輸出(PWM)等。
3 系統軟件設計
由于本系統軟件功能相對復雜,既有輸入和輸出模塊,又要完成測量操作和數據的處理,對速度和實時性要求比較高,為此本文采用了μC/OS-II 實時操作系統。μC/OS-II 是一種簡單、高效、源代碼公開的實時嵌入式操作系統,μC/OS-II 提供的基本功能包括任務的建立、運行、刪除、設置任務優先級、進行任務切換等,并且為任務之間的通信和共享資源的保護提供了事件標志、信號量、互斥信號量、郵箱四種機制。本文采用μC/OS-II 實時系統,充分體現了其簡潔、高效的特點。軟件設計主要是μC/OS-II 的移植和任務的編寫。將操作系統移植到ARM9 處理器上,通過μC/OS-II 內核的任務調度,可解決傳統嵌入式軟件設計中出現的編程復雜、可維護性差以及系統的實時性得不到保證等問題。系統軟件包括ARM 的程序設計,基于μC/OS-II 操作系統,選用Keil uVision3 集成開發環境,所有程序代碼都采用C 語言來編寫,具有較強的可移植性和可讀性。
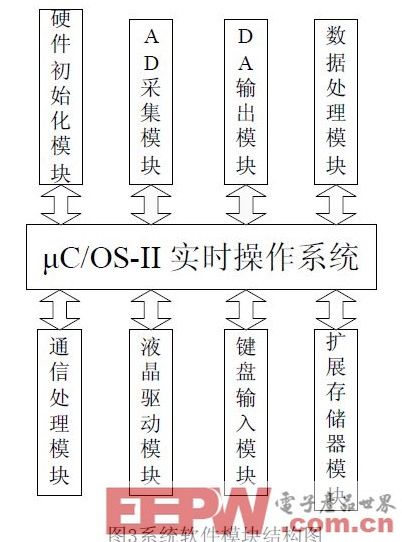
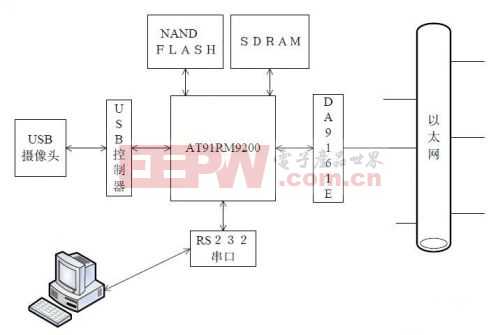
如圖3 所示,系統軟件由數據的采集、處理、顯示等模塊組成,這些模塊由μC/OS-II 實時操作系統統一調度、運行,這樣軟件部分就變成了對各個任務模塊程序的編寫,數據的采集由AD 采集模塊來完成,數據的處理由ARM 通信和數據處理模塊、DA 轉換模塊等來完。顯示主要是液晶的顯示和驅動模塊。其中底層驅動包括系統硬件的初始化、UART 接口的數據發送及接收的底層代碼,液晶驅動模塊包括液晶屏的點、線、漢字等內容顯示的實現代碼等等。
4 結束語
本文敘述了相位式激光測距的原理,較為詳細地給出了系統的設計方案,并且采用ARM9 處理器和引入了嵌入式實時操作系統μC/OS-II.一方面,實時操作系統具有高效的多任務優先級管理、可裁減的內核結構、強大的擴展性和可移植性以及微秒級的中斷管理等都更加有利于提高效率,有效的降低了應用程序開發的難度,有利于提高軟件開發效率和開發周期的縮短。另一方面,嵌入式技術的應用和ARM9 處理器自身的性能給系統提供了優良的硬件條件,這樣從整體上提高了測距系統的實時性、穩定性、抗干擾性,具有一定的實用價值。


評論