用可編程模擬電路實現MEMS陀螺儀測量系統

Leon Foucault在1852年發明了世界首個陀螺儀,這種傳統的機械式陀螺儀如圖1所示。Foucault認為,利用固定位置上的旋轉物體可以測量地球的旋轉。在理論上他的想法是正確的,但當時他只能讓物體保持旋轉數分鐘的時間,因此不足以觀察到地球的顯著運動。不過隨著電氣馬達的發明,陀螺儀突然變得切實可行了,因為馬達能讓物體無限地旋轉下去。在這種思想指導下,人類發明了電動回轉羅盤,并很快用于船只和飛機上。
微機電系統(MEMS)技術的飛速發展已經允許制造商在微型芯片上制造出完整的陀螺裝置。不僅如此,隨著時間的推移,MEMS陀螺儀價格正變得越來越便宜,體積也越來越小。技術的發展和價格的降低使得集成式MEMS陀螺儀能很好地工作于許多實際應用場合。
雖然傳統的陀螺儀主要用于測量角位移,但目前的MEMS陀螺儀可以用來測量以度/秒為單位的角速度。如圖1所示的傳統陀螺儀的工作原理是角慣性屬性。當一個旋轉物體,如旋轉陀螺,在它的旋轉軸方向變化方面出現很強的慣性時,這種屬性可以很容易觀察到。
這種現象跟我們能騎自行車的道理是一樣的。圖1所示裝置的中間有個圓盤在高速旋轉。這種旋轉將使圓盤產生巨大的慣性。當裝置旋轉時,中間的圓盤會停留在相同的角位置。此時可以很容易測出圓環和固定旋轉圓盤之間夾角的變化。陀螺儀的旋轉部分也能有效地用于保持角取向不變,因此陀螺儀在羅盤中得到了很好地應用。
MEMS陀螺儀的原理
MEMS陀螺儀比傳統陀螺儀更有用,因為它們一般測量的是角速度而不角位移。角速度測量更加有用,因為隨著時間的累積能夠間接測量出角位移和速度。
有許多技術可以用來檢測MEMS陀螺儀的角速度。這些技術通常都有一個共同點,即它們使用振動塊而不是使用旋轉塊。振動塊能抵制振動軸向的變化,即使與它相連的結構在旋轉。因此,使用振動而不是全程旋轉可以獲得同樣的旋轉檢測效果,而全程旋轉在MEMS設備中更難實現。
MEMS陀螺儀背后的物理現象就是科里奧利效應。這種現象是當一個物體在旋轉的參考系中作線性方向運動時產生的(請參考圖2)。假設你站在正在旋轉的旋轉木馬上,所處位置標示為t1。如果你決定經直線向外邊走,你就能體會到科里奧利效應。
圖1. 傳統機械式陀螺儀。
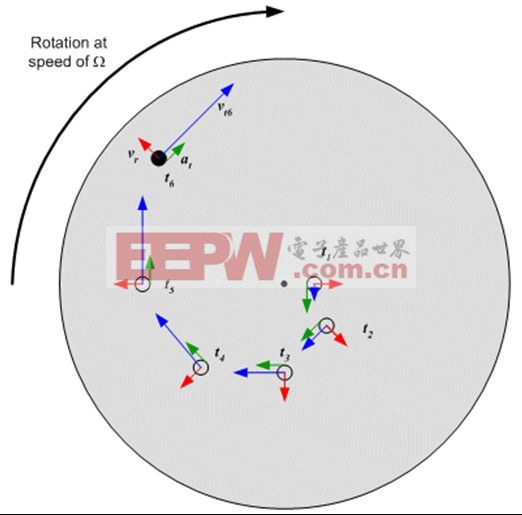
圖2. 科里奧利效應中呈現的速度和加速向量。
根據物理知識我們知道,旋轉木馬上的任何點都有一個瞬時速度Ωr,其中Ω是旋轉速度,r是旋轉木馬上該點的半徑。因此圖2中每個藍色速度向量都有一個幅度Ωr,如果你站在其中任何點上,你會擁有相同的切向速度。紅色的等速向量代表了徑向速度,是你走向外邊的速度。當你接近外邊時,你的切向速度會增加。這樣就從科里奧利效應獲得了一半的加速效果,其值等于Ωv,其中v代表徑向速度。
科里奧利加速的第二部分來自加速向量(標為綠色)。如果看一下t1和t2處的紅色速度向量,你會注意到它們的幅度是相同的,但它們的方向不同。這種速度向量的方向變化意味著綠色向量的方向上必定存在切向加速。這種加速就是科里奧利加速的另外一半,同樣等于Ωv。因此,如果將兩個獨立的加速向量加在一起,你就可以得到2Ωv。如果你的質量是m,這種加速將對你施加2Ωvm的力。該力會在旋轉木馬上產生幅度相同、方向相反的反作用力,其值等于–2Ωvm。因為這是負值,因此該力的方向與旋轉方向相反。
如果你準備走回到旋轉木馬的中心,那么所有數學計算都是一樣的,除了紅色速度向量現在指向里面,使它們呈現相反的符號。此時你的反作用力的最終等式是 –2Ω(–v)m,或2Ωvm。因此如果你向里面走,你在旋轉木馬上產生的反作用力幅度將保持不變,方向與旋轉方向保持一致。
為了形象地表示MEMS陀螺儀,可以將人用徑向移動的微型振動塊來代替,并利用在上面安裝陀螺儀的任何你希望的結構來代替旋轉木馬,如圖3所示。
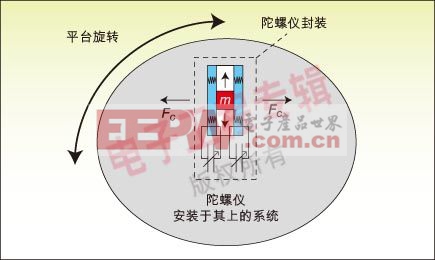
圖3. MEMS陀螺儀的實現。
此時陀螺儀所需的就是用相關電路去檢測電容的振蕩,并將它轉換為電壓,再經整流后輸出直流電壓。這種電路的目的是將旋轉速度轉換為電壓。一些陀螺儀制造商正在將所有這些功能集成進單個封裝中,從而實現小型、高效但價格較高的解決方案。也有些MEMS陀螺儀制造商為了降低產品價格,采用了最簡的信號調理方法,因此需要使用外部電路實現信號調整和準確測量。
MEMS陀螺儀的應用
最便宜和被廣泛使用的MEMS陀螺儀使用了盡可能少的模擬電路,數字電路基本沒有。這些陀螺儀的輸出阻抗相對較高,輸出信號中存在較大值的直流偏置。因此減少直流偏置和提高輸入電路阻抗的重擔落在了系統設計師身上。
如今,MEMS陀螺儀被廣泛用于各種消費類設備,如數碼相機的圖像防抖、筆記本電腦的硬盤保護和數字羅盤。陀螺儀還在汽車的電子穩定控制(ESC)系統中得到了很好的應用。隨著工業和消費類機器人的發展,陀螺儀將有望在這兩個市場大顯身手,并有助于滿足組裝線上提高自動化程度的要求。在機器人中,陀螺儀將有助于自動控制系統控制機器人手腳的移動和平衡。
圖像防抖信號調理電路
在圖像防抖應用中,陀螺儀有助于糾正拍照者手的抖動。當拿相機的手抖動時,圖像傳感器也會抖動,從而使拍到的圖像模糊不清。在這種應用中要用到兩個陀螺儀,以確定x和y軸的抖動幅度。信號調理電路和處理器則測量陀螺儀的輸出,并送出校正信號,以動態地改變圖像傳感器的參考系。參考系的改變是通過物理上移動圖像傳感器或改變將數據反饋回圖像處理器的圖像傳感器的一部分而實現的。
典型要求如下:
四極低通濾波器:fc=250Hz
差分或單端增益:100
ADC采樣率:1ksps/通道
ADC分辨率:10位
滿足上述要求的電路有許多,挑戰來自于使電路更具性價比,并足夠小到能裝配進非常緊湊的數碼相機中。即使你設計的電路很小很便宜,但仍需要有足夠高的性能,以便不影響系統性能。除了滿足上述要求外,理解設定功能也有助于使設計決策更簡單化。
信號調理電路的第一級很重要,因為一些低價陀螺儀的輸出阻抗非常高。另外,在圖像防抖應用中,信號的直流部分沒有功能價值,緣于那些與偏置有關的問題,這一點顯得很重要。
圖4所示的電路描述了在單端陀螺儀應用中的一個公共設計問題。輸入電路由以下元器件組成:有一定輸出阻抗(Zout)的陀螺儀、隔直電容、連接到模擬地(AGND)的電阻(用于將交流耦合的輸入信號中心置于AGND),以AGND為參考的放大器。使用隔直電容而不用軟件濾波器的原因是陀螺儀輸出偏置電壓(最高100mV)將被放大100倍,會使放大器的輸出接近滿幅電壓。
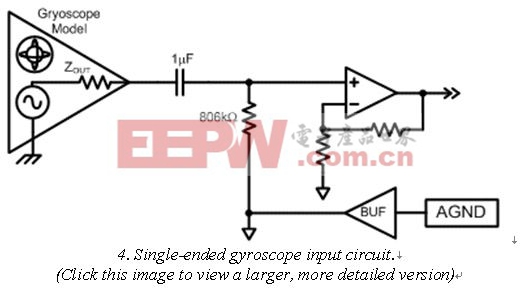
圖4. 單端陀螺儀的輸入電路。
為了避免測量誤差超過5%,陀螺儀和隔直電容的復合阻抗應至少小于浮動電阻的20倍。假設Zout=40kΩ,容性電抗為3.2kΩ(1?F @ 最低有效頻率50Hz ),總的阻抗是40.1kΩ,那么要求電阻阻值為803kΩ(相當于806kΩ 1% )是比較合理的。
如果上述電路只在圖像防抖功能激活時才被加電(在即將照相













評論