基于PLC系統的現場總線運動控制模塊的設計和實現

計算機數字通信技術及信息技術的發展,推動了自動化技術的進步;特別是近十年來興起的現場總線技術(Filedbus),是計算機數字通信技術向工業自動化領域的延伸,它的發展將促使自動化系統結構發生重大變革,是傳統的基于PLC及DCS控制技術系統發展的必然歸宿。
現場總線技術的一個顯著特點是其開放性,允許并鼓勵不同廠家按照現場總線技術標準,自主開發具有特點及專有技術的產品。依照現場總線技術規范,不同廠家產品可以方便完成組態與集成,構成面向行業、適合行業特點的自主控制系統。這一特點為更多的自動化產品制造商自主開發并推出自主知識產權的自動化系統提供了可能。也為自動化系統集成商開發面向行業應用的成套技術和自動化系統提供了機會。
現場總線技術以其先進性、實用性、可靠性、開放性的優點,必然成為未來自動化技術發展的主流。基于現場總線技術的控制系統(Filedbus Control System-FCS)與人們預想的一樣,對傳統的PLC、DCS系統形成了巨大的沖擊。FCS已不再是一種預測、一種設想,而是實實在在的作為先進控制系統產品出現在市場上。本文將描述傳統PLC控制系統向基于現場總線控制系統的演變過程,以現場總線PROFIBUS為背景,描述一個基于現場總線控制系統的結構組成,并分析系統的市場前景。
1 運動控制模塊的研制
本設計中,運動控制模塊負責電機的驅動、多軸聯動、G代碼解釋等工作,是數控系統的"大腦".因此運動控制器的性能直接關系到整個機床的性能。
1.1 總體結構
為實現高性能數控計算,系統采用雙MCU結構,主控MCU負責G代碼讀寫與解釋、人機界面、網絡通信等任務;NC運動控制MCU(即運動控制芯片)作為一個專用數字芯片,負責三軸電機的速度控制、定位、多軸直線和圓弧插補等任務,以保證運動控制模塊在完成復雜的工作時仍能提供良好的性能。運動控制模塊結構如圖1所示。
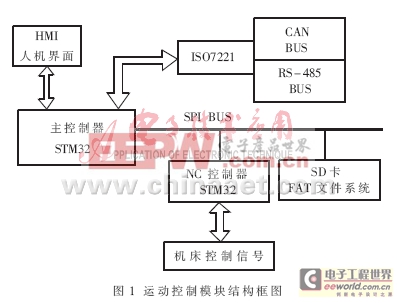
模塊采用SD卡作為G代碼文件的存儲器。SD卡具有大容量、小體積、支持熱插拔等特點,尤其是其兼容SPI總線讀寫,省去了主控制器作為USB盤讀寫的硬件,降低了成本。
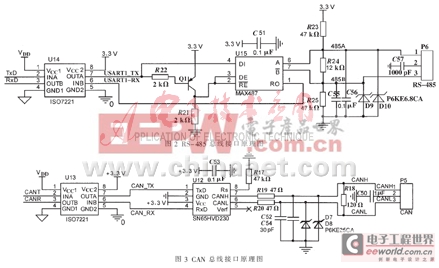
運動控制模塊具有現場總線通信功能,支持RS-485和CAN總線2種現場總線物理層規范。以可靠性為設計原則,總線接口與主控制器進行了電氣隔離,并加入保護元件提高其抗瞬態干擾能力。圖2、圖3分別是模塊RS-485和CAN總線的隔離接口原理圖。其中使用了TI公司的高速數字隔離器ISO7221進行數字信號的電氣隔離,同時在接口端設置了瞬態抑制二極管(TVS管)進行保護,確保了硬件在各種環境下的可靠性。
1.2 Cortex-M3與STM32簡介
Cortex-M3是一個32位的核,在傳統的單片機領域中,有一些不同于通用32位CPU應用的要求。譚軍舉例說,在工控領域,用戶要求具有更快的中斷速度,Cortex-M3采用了Tail-Chaining中斷技術,完全基于硬件進行中斷處理,最多可減少12個時鐘周期數,在實際應用中可減少70%中斷。
基于Cortex-M3核的STM32F103系列MCU,運行于最高72 MHz的總線頻率,可以獲得1.25 DMIPS/MHz的運算性能、單周期乘法指令、硬件除法器,帶有容量至少為32 KB的Flash及6 KB的SRAM、2個12位A/D、7通道DMA、6路16位定時器及PWM、SPI、I2C、USART、USB、CAN等高性能模塊,并具有最高18 MHz輸出頻率的高速GPIO.在電機和運動控制的應用中,可以充分發揮其先進內核的性能和豐富的模塊資源特性。
1.3 工作流程
運動控制器工作流程總體示意圖如圖4所示。
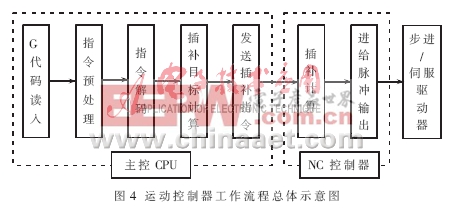
1.3.1 G代碼解碼
運動控制模塊接收到工作指令后,開始進行G代碼的解釋執行任務。G代碼存放在SD卡中,主控制器集成FAT文件系統,支持SD卡的文件讀寫。G代碼讀入后,逐行進行第一遍掃描(即指令預處理),期間將注釋、空格、非法字符去除,小寫字符轉換成大寫,以方便解碼程序進行識別。
經過預處理的G代碼指令逐行送入G代碼解碼程序,解釋程序再逐字檢查其是否為G代碼的指令字符,若是,則提取關鍵字的后續數值,作為該指令的操作數,將其提取出來。其中用到了ANSI C的標準庫函數sscanf( )(位于stdio.h中),可以方便地提取字符串中指定的信息,支持類正則表達式的格式字符串,非常靈活。同時因為使用了ANSI C的標準庫函數,程序移植簡單。
以下是G代碼解碼程序的部分代碼:
/*遍歷整個s字符串,找到字符后,提取后續數字,并存入中間代碼中*/

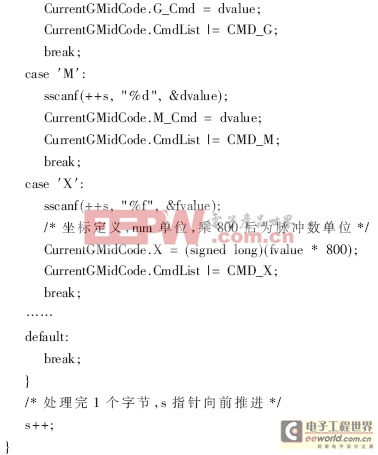
其中,CurrentGMidCode是預定義的結構體變量,用于保存每行G代碼提取出來的指令及其操作數,結構如下:
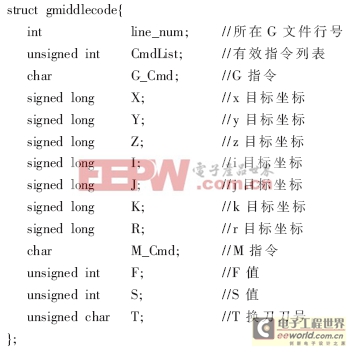
提取到每行G代碼的關鍵信息后進行相關處理,計算出每行代碼的運動起止坐標,將其通過SPI總線發送至NC控制芯片,控制電機運動。
1.3.2 插補進給
電機的插補運算、加減速和進給控制,由一個獨立STM32微控制器完成,并稱為NC運動控制芯片。
目前市場上的運動控制芯片主要是日本和歐美公司的專用ASIC和各數控廠家自行開發的FPGA芯片,雖然性能優越,但價格不低。相對于使用ASIC芯片或FPGA芯片,完成同樣的任務使用MCU方案,硬件生產成本和開發成本均具有明顯優勢,當STM32微控制器運行在其最高頻率為72 MHz下時,性能完全可以滿足中低端數控系統應用的要求。
在三軸數控銑系統中,NC運動控制芯片需要實現三軸快速定位、二軸直線插補、二軸圓弧插補、三軸直線插補的功能。
插補是在組成軌跡的直線段或曲線段的起點和終點之間,按一定的算法進行數據點的密化工作,以確定一些中間點,從而為軌跡控制的每一步提供逼近目標。在本控制器中,選用逐點比較法作為基本的插補算法,具有算法簡單高效、進給速度均勻的特點,同時支持三軸的直線插補[1],滿足本控制器對插補算法的要求。
逐點比較直線插補,就是執行機構每走一步都要和給定運動軌跡上相應的坐標值相比較,比較的結果稱為偏差函數F,根據偏差的正、負決定下一步的進給方向。實質上這是一種用階梯折線來逼近直線的一種算法,它與規定運動軌跡之間的最大誤差為1個脈沖當量(每走1步移動的距離)。因此,只要把脈沖當量設計得足夠小,就可以達到運動精度的要求[2].
1.4 Modbus-RTU協議的實現
Modbus 協議定義了一個控制器能認識使用的消息結構,而不管它們是經過何種網絡進行通信的。它描述了一控制器請求訪問其它設備的過程,如何回應來自其它設備的請求,以及怎樣偵測錯誤并記錄。它制定了消息域格局和內容的公共格式。Modbus協議工業控制已從單機控制走向集中監控、集散控制,如今已進入網絡時代,工業控制器聯網也為網絡管理提供了方便。Modbus就是工業控制器的網絡協議中的一種。
Modbus-RTU協議以幀為通信的基本單位,幀格式為:地址碼1 B;功能碼1 B;數據區N B;錯誤校驗2 B CRC碼。
本運動控制器在其RS-485接口上實現了Modbus-RTU協議,使用了當今流行的免費開源協議棧FreeModbus-RTU,從而保證了可靠的通信、節約了開發成本。
FreeModbus是針對通用的Modbus協議棧在嵌入式系統中應用的實現,其遵循BSD開放源代碼協議,并可以免費用于商業用途,成熟可靠。移植FreeModbus到STM32處理器只需要少量資源,除了1個雙工USART外,只需要配置1個定時器進行超時判斷即可。
2 基于C200HE型PLC的運動控制網絡實驗平臺設計
2.1網絡結構
歐姆龍(OMRON)公司的C200HE-CPU42型PLC帶有RS-232口和通信板。通信板支持各種通信協議,如上位鏈接、RS-232通信、1:1鏈接、NT鏈接(1:1、1:N)以及協議宏功能等,并能根據需要進行切換。通過協議宏功能,用PMCR指令,通過指定按標準設置的順序,就能設置成Modbus協議。
運動控制系統的網絡結構體系分為3個層次:管理層、控制層和器件層,如圖5所示。
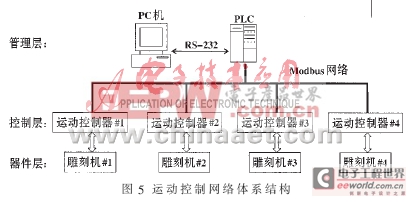
(1) 管理層:是最高層,負責系統的管理與決策。其中PLC是整個控制網絡的核心,它作為Modbus網絡的主設備,通過Modbus網絡與各運動控制器之間傳輸生產管理信息、質量管理信息及CNC的運行情況等數據。上位計算機運行組態軟件,通過RS-232串行通信口與PLC通信,實時監控系統的運行。
(2) 控制層:是整個網絡系統的中間層,各運動控制模塊掛接在Modbus網絡上成為其從節點,負責下面CNC運行過程的監控、協調和優化。
(3) 器件層:雕刻機是整個網絡的最低層,是現場總線網絡中直接面對現場的器件和設備,為網絡的終端執行機構。
2.2 用協議宏功能實現Modbus協議
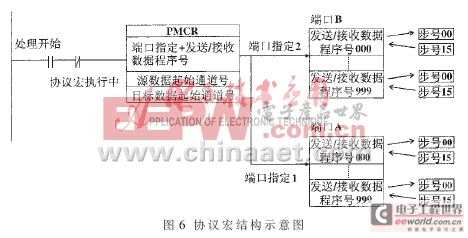
在協議宏軟件CX-Protocol上創建工程,選擇正確的設備名稱、型號及網絡類型。然后創建通信序列和接收序列,并下載到PLC通信板中。在PLC中編寫程序,用PMCR指令調用指定的通信序列,實現與運動控制模塊的通信。通信協議宏主要由發送/接收數據程序構成,每個通信協議最多包含0~999個發送/接收數據程序,每個發送/接收程序最多由16步構成。協議宏結構如圖6所示[3].
2.2.1創建通信序列
將通信序列號設為"000",在通信序列中要設置PLC與通信板鏈接字、傳輸控制參數、響應接收方式、數據接收監控時間、數據接收完成監控時間、數據發送完成監控時間等內容。
(1) 創建通信步(Step)
在通信序列"000"中創建Step00和Step01 2個通信步。Step00用于控制運動控制模塊的運行,Step01用于查詢運行狀態。在每一個通信步中包括步號(Step)、重復計數器(Repeat)、命令(Command)、重試次數(Retry)、發送信息(Send Message)、接收信息(Recv Message)、是否響應(Response)、出錯處理方式(Error)等內容。
(2)創建發送和接收信息
發送信息與接收信息必須嚴格按照Modbus協議格式編寫,需要設置校驗碼(Check Code)、數據長度(Length)、地址(Address)和數據(Data)等信息。
(3)創建接收陣列
PLC向運動控制模塊發送指令時,模塊可能返回運行正常或錯誤響應信息,在接收數據時,使用陣列的形式加以區分。系統創建了2種可能接收的信息"Run Normal"和"Error",并針對每一種情況設定不同的處理方法(Next Process),用于可能出現的各種響應信息的處理。
2.2.2 通信實現
(1) 通信設置
PLC的通信參數設定必須與運動控制模塊的參數一致。對通信板上的開關做調整時,設SW1置于ON側,使用RS-485方式;SW2設定為ON,接入120 Ω的終端電阻;設定通信板端口A為通信協議宏方式。
(2) 編寫通信程序
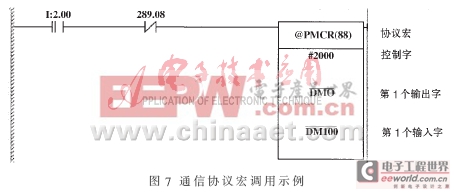
通信協議宏的調用程序段如圖7所示,圖中:289.08為通信板端口A操作標志,當289.08為OFF時,表示可以使用端口A進行通信。通信過程中289.08置為ON,通信結束后,289.08置為OFF狀態;當2.00由OFF變為ON、且289.08為OFF時,調用通信板上的通信序列,通過端口A發送和接收數據。通信序列號、發送和接收數據的存放區由PMCR指令的3個操作數指定,其梯形圖見圖7.
使用2片32位高性能單片機組成雙核系統實現運動控制模塊的功能,兼顧了性能和價格。同時因為使用了ANSI C的標準庫函數,程序移植性好,數控解釋程序中的關鍵技術G代碼解釋器的開發難度大大降低。在運動控制模塊中移植Modbus協議,從而使其能簡單地與PLC系統組成運動控制網絡。采用歐姆龍通信協議宏實現控制多臺運動控制模塊,簡化了現場布線,達到了設計要求,取得了很好的效果。

數字通信相關文章:數字通信原理
隔離器相關文章:隔離器原理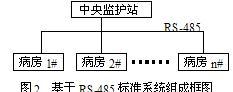


評論