基于CAN-bus和以太網的區域信息管理系統

CAN(ControllerAreaNetwork——控制器局域網)是一種由CAN控制器組成的高性能串行數據局域通信網絡,是國際上應用最廣泛的現場總線之一。它最早由德國Bosch公司于1984年推出,最初用于汽車內部測量與執行部件之間的數據通信。CAN-bus總線模型符合OSI的7層結構;CAN-bus規范已被ISO估計標準組織制定為國際標準。由于其具有多主機方式、傳輸距離遠(最遠可達10km)、傳輸速度快(最快可達1Mbps)、抗干擾能力強、應用靈活等諸多優點,所以被認為是最有發展前途的現場總線之一。目前,除了應用于汽車電子領域中,CAN-bus總線現還被廣泛應用于工業現場控制、電力通訊、小區安防、環境監控、航天航海等眾多領域中。
以太網則是當前主流的網絡信息傳輸媒體,也是TCP/IP使用最普遍的物理網絡。TCP/IP(TransmissionControlProtocol/InternetProtocol——傳輸控制協議/網絡協議)是一個工業標準的協議集,包括IP、TCP、UDP等子協議,保證數據在網絡上的正確傳輸。TCP/IP協議為四層模型:應用層、傳輸層、網絡層和數據鏈路層。每層都有不同的功能,而且層和層之間在邏輯上是相互獨立的。由于TCP/IP是世界上最大的Internet采用的協議組,而TCP/IP底層物理網絡多數使用以太網協議,因此,“以太網+TCP/IP”成為互連網技術中應用最普遍的技術。以太網在工廠管理層、車間監控層將成為主流技術,與互連網技術結合是未來工廠網絡通訊技術基礎;但對一般工業網絡要求實時性、確定性通信場合,現場總線技術還將處于主導地位,因此在今后一段時間內多種網絡技術還會繼續并存,我們必須根據實際需要采用合適的網絡技術。
本文即介紹一種由CAN-bus網絡構建設備網,由以太網構建信息網,通過兩者的有機聯接,從而構成一個中型/大型的遠程監控/數據傳輸網絡。
一、概述
某一個設計項目,需要考慮連接大約30,000個網絡節點,并可以對每個節點實時地采樣數據、輸出控制;這些網絡節點分布在不同的區域,每個區域(直徑在1公里范圍內)最多有近百個節點。而且該網絡有一點比較重要的要求:單個區域內的網絡節點對數據的實時性具有較高的要求。
按項目的以上要求,綜合考慮設計成本、生產成本、可靠性、可維護性等多方面因素,我們考慮采用“設備網——信息網”的方式構建整個網絡。
在單個區域內,由CAN-bus網絡構建設備網,總體成本較低,滿足實時性的要求,且應用可靠,維護方便;設備網的固定節點(地址為00號)同時作為網關,將CAN-bus網絡連接至以太網,從而形成可以遍布全球的信息網,可以通過組態環境統一監控設備信息。
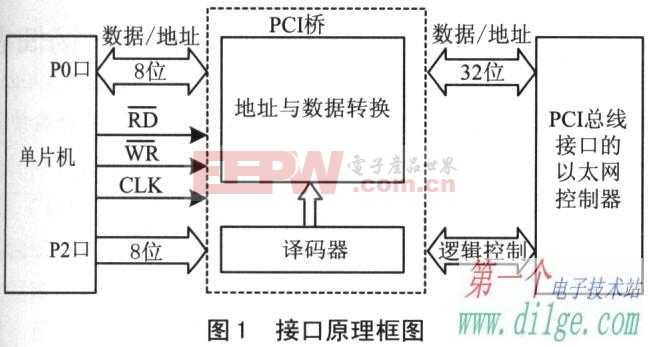
基于CAN-bus和以太網的區域信息管理系統的網絡連接如圖1所示。

二、現場設備網的選擇
現場設備網組網方式有多種選擇,比如RS-485、CAN-bus、Lonworks、TCP/IP等;下面將各種方式進行比較,以考慮選擇最合適的方式。




評論