汽車電子系統--未來展望

目標和需求
當今的車輛安全電子系統在功能上是獨立的,控制某些變量來響應某些輸入。例如,當加速度計輸出觸發了限幅比較器時,安全氣囊控制器會引爆其彈出裝置。當車軸編碼器指示出現了突然加速時,牽引控制系統會進行剎車,以減小車輪上的扭矩。這些系統雖然對車輛安全都有貢獻,但是,由于其輸入所表示的信息并不全面,因此,這些系統工作起來可能有不當之處。壓到路面的阬上,或者停車時撞到其他車上都有可能引爆安全氣囊。坑洼的路面也會導致牽引控制系統出現誤動作。
Gartner的半導體研究主任Steve Ohr認為,這一切都需要改變。4月24號,在加州圣克魯斯全球新聞峰會上,Ohr在他主持的小組討論致辭中解釋說:“高級安全氣囊控制器有多個傳感器,確實能夠判斷是否出現了撞車。在不遠的將來,控制器會根據監視乘客和貨物的傳感器輸出來確定在出現撞車時怎樣更好的應用各類安全氣囊。”
在這一點,安全氣囊控制器會越過一個關鍵閾值:從響應輸入,進行維持,直至響應車輛的動態模型。Ohr強調說,車輛的其系統也會對這種變化進行回應,產生連鎖反應。Ohr認為:“在車道偏離和緊急危險探測器等安全系統上也有類似的情況。每一個系統都變得越來越智能,從傳感器集成發展到傳感器融合。”這種發展是在非常復雜的環境中進行的。Cadence設計系統公司產品市場資深總監Panelist Frank Schirrmeister評論說:“在2010年,一輛高端汽車會有750個CPU,實現2,000種不同的功能,需要十億行代碼。”Schirrmeister說,這種復雜程度迫使開發人員采用與硬件無關的平臺,例如,汽車開放系統體系結構(AUTOSAR)、集成機械電子軟件開發包等。在這種紛繁復雜的情況下,系統設計人員努力應對系統處理數據時出現的突然變化。
從隔離到融合
參加小組討論會的Altera公司汽車業務部主任Brian Jentz認為,避險系統就很好的體現了這種變化。Jentz說,“今天,即使是后視攝像機等相對簡單的系統也有很大的處理要求。低成本攝像機需要魚眼校正功能來糾正圖像,使得駕駛員能夠很方便的看清楚所顯示的內容。也需要對這些攝像機進行補償,在低亮度條件下產生可用的圖像,這一般也需要自動目標識別功能。在攝像機中能夠很好的完成這些功能,但在中央引擎控制單元(ECU)中實現這些功能成本會更低一些。”Jentz還認為:“攝像機的發展趨勢是高清晰,這意味著每幀會有百萬像素。如果您向ECU發送圖像,在這些數據離開攝像機之前,需要對數據進行壓縮。”
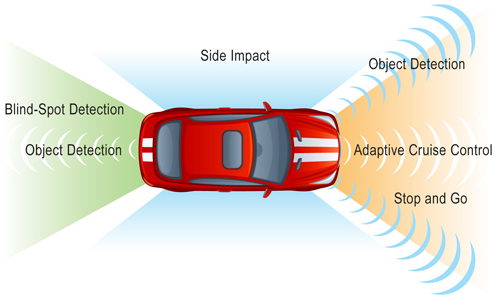
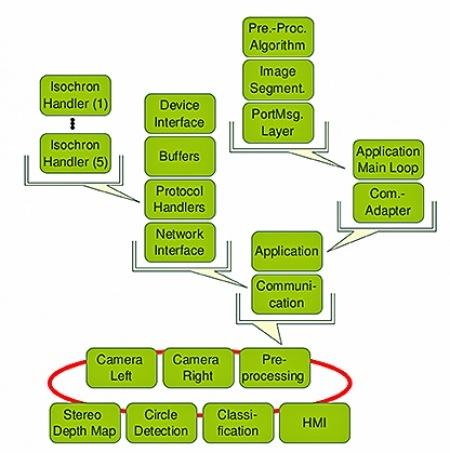
在今后的發展中,數據傳送問題會越來越復雜。危險探測功能會從后視攝像機簡單的顯示圖像發展到對車輛周圍的整個動態環境進行建模。在這一點,系統必須將來自多個攝像機的圖像拼接起來——至少360度范圍內的8臺攝像機,并且支持范圍和速度探測功能,如 圖1 所示。絕對需要中央處理器,ADAS需要同時將多路壓縮后的視頻流傳送給ECU。
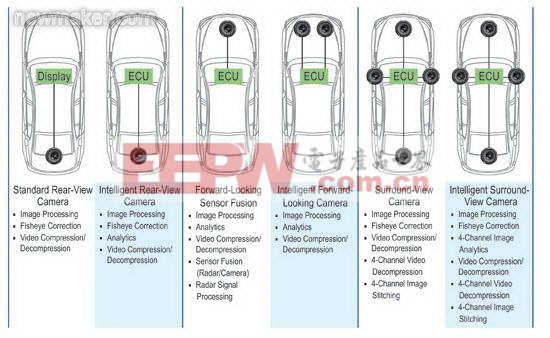
圖1.攝像機布局和使用方法確定了處理圖像所需要的算法
Kalman及其不足
Kalman濾波器可以處理來自被觀察系統不同類型傳感器的多路受噪聲影響的數據流,將其組合到一個低噪聲模型中。一般而言,它通過維持三種內部數據格式來實現這一功能:對當前系統狀態的估算,基于物理條件的“航位推測”模型——用于預測系統的下一狀態,以及評估每一輸入可信性的表格。在每一循環中,Kalman濾波器將傳感器數據整合到一起,利用這些數據對系統狀態進行初步估算:例如,車輛周圍物體的位置和速度等。同時,濾波器對前一狀態應用航跡推測模型,進行第二次估算:其他車輛移動到這里、這里、那里等等,行人會走到哪里,樹木應該在哪些位置等。然后,濾波器對兩種狀態估算進行對比,考慮到輸入的可信性,采用新的最佳估算更新前一狀態:在這里,認為所有的都是真實的。最后,Kalman濾波器將新的狀態估算發送給分析軟件,這樣,軟件可以評估出可能出現哪些危險,更新其傳感器可信性表格,提示任何有問題的輸入。
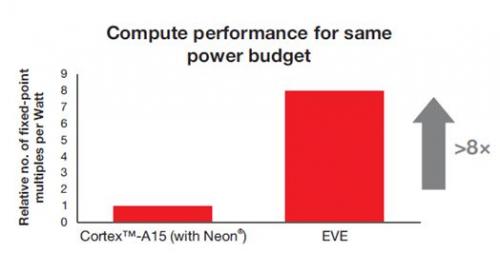
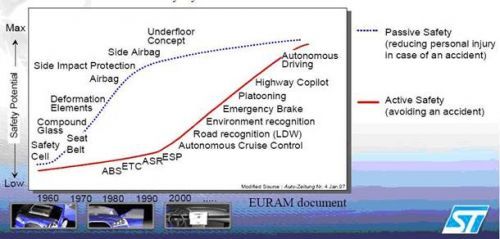
好消息是,盡管在不連續讀數、較強的噪聲以及各類不同的傳感器數據條件下,Kalman濾波器也能夠整合實現外部環境穩定精確的模型。但是也有問題。處理高清晰(HD)視頻輸入的Kalman濾波器會占用大量的處理資源,其分析例程也需要很強的處理能力,如 圖2 所示。Jentz指出:“硅片性能已經無法滿足算法開發的要求。對性能的需求基本上是無限的。”



評論