快速公交專用車道檢測

目前,國內外學者已經提出了很多車道線檢測算法,主要分為兩類:一類是基于圖像特征的檢測方法,即特征驅動法,是基于道路圖像的一些特征(如車道線顏色、寬度以及邊緣等特征)將圖像的所有點標記為車道線點和非車道線點,這種機制要求道路的車道線顏色較為明顯,邊緣較為清晰,否則無法得到準確的檢測結果;另一類方法是基于模型的檢測方法,是根據提取的特征對預先定義好的車道線模型進行匹配,將車道線的提取轉化為車道線模型中參數的計算問題。模型的假設主要有直線模型和曲線模型兩種,其優點是對噪音不敏感,能較好地處理圖像中物體局部被遮擋和覆蓋的情況。本文結合道路的紋理特征并建立模型進行車道檢測,既充分利用圖像的信息,又在一定程度上保證了算法的魯棒性。
本文首先對圖像進行預處理,然后對圖像進行Hough變換或者Gabor變換,得到車道線位置信息,判斷出車輛是否在車道內行駛,如果不在則發出預警信號。
1 圖像的預處理
圖像的預處理主要是對攝像頭實時采集的圖像進行前期處理,主要包括去除圖像的各種噪聲,并根據攝像機的位置調節算法中的一些參數提取圖像的感興趣區域(ROI),以及進行邊緣檢測等,目的是為了加強圖像的有用信息,抑制干擾。
標定攝像頭以后,選取一定的區域作為車道線檢測區域,進行平滑去噪,并對其邊緣進行檢測。本文采用Canny邊緣檢測。圖1為拍攝的原始道路圖像,圖2為不同環境下(白天、陰天、夜晚)的檢測結果。


2 基于Hough 變換的車道線檢測
2.1 傳統Hough 變換原理
對于建立的車道線模型為直線的情況下,Hough 變換作為車道線檢測的一個方法, 廣泛用于車道線識別領域。Hough 變換的實質是對圖像進行坐標變換, 使變換的結果更易于識別和檢測。Hough 變換的表達式為:
其中, (x,y ) 表示圖像空間的某一點, ρ 是圖像空間中直線到坐標原點的距離,θ 是直線與x 軸的夾角。傳統Hough 變換投票空間ρ 和θ 的選擇范圍通常為ρ∈(0,r)( 其中r 為圖像對角線長度) ,θ∈(0,180 ) .(ρ ,θ)為坐標變換后的參數空間某一點, 其將圖像空間(x-y ) 的點轉換到參數空間(ρ-θ), 可以證明圖像空間中同一直線上的點在參數空間中對應的正弦曲線交于一點(ρ ,θ)。因此對圖像空間的目標點進行坐標變換投影到參數空間,通過統計參數空間的總投票次數較多的點, 即可找到圖像空間對應的直線方程。
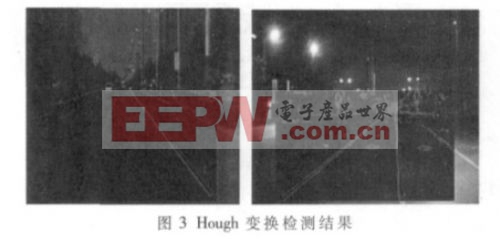
Hough變換作為一種經典的車道線檢測算法,具有很強的適應性,然而該算法較為耗時,當車道線外在環境因素較為不清晰,或者受道路上一些其他因素的影響下,結果受干擾較大。Hough變換檢測結果如圖3所示。
2.2 基于ROI區域改進的Hough變換的車道線檢測
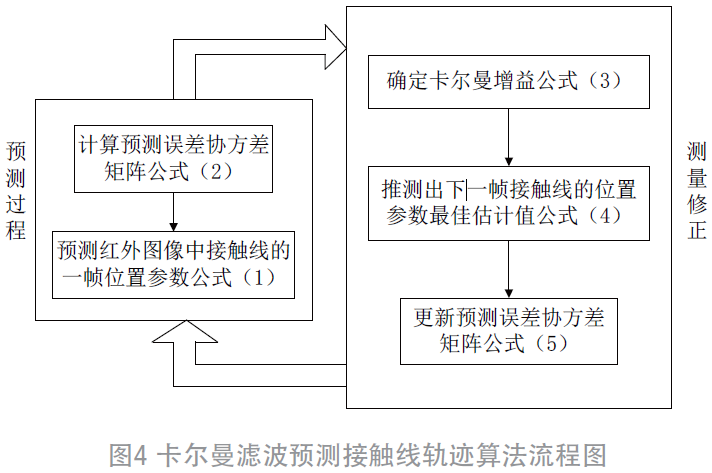
針對圖像中道路的車道線一般分布在道路左右兩邊的情況,本文對傳統Hough變換的應用進行了改進,限定其投票空間的范圍,也就是限定ρ和θ來調整其投票空間的范圍。限定其左右車道線的極角和極徑,調節好攝像頭,通過不斷的測試,得到目標點的極角約束區域和極徑約束區域,也就得到感興趣區域(ROI),如圖4所示,只檢測落在白色區域內的車道線。



評論