一種高速鐵路接觸網目標檢測與跟蹤方法

作者簡介:李培云(1995—),女,安徽滁州人,碩士生,主要研究方向為機器視覺,E-mail:1125924814@qq.com。
本文引用地址:http://www.j9360.com/article/202204/432718.htm摘要:實驗結果表明:該算法能在大多數情況下實時、準確地檢測跟蹤接觸線,為城市軌道安全運行提供了保障。
0 引言
隨著我國電氣化鐵路不斷地往高速、重載方向發展,使接觸網- 受電弓在高速運行工作狀態下越來越受到關注[1-2]。由于接觸網長期保持和受電弓滑板相互接觸,在機車行駛過程中時刻磨損,從而給機車取電的性能帶來了很多不可靠的因素,直接影響機車的行駛狀態,嚴重時會導致發生安全事故。因此需要實時檢測接觸網的運行狀態,以保障機車安全行駛。
近年來,國內外對接觸網運行狀態監測受到了研究學者的廣泛關注。文獻[3]基于識別出接觸線的導高、拉出值以及硬點部位,提出了一種基于圖像處理的鐵路接觸網檢測系統。文獻[4]利用高精度傳感器采集線夾溫度等參數,提出了一種基于張力與溫度的接觸網安全狀態在線監測系統。文獻[5] 研究了一套牽引供電接觸網溫度在線監測系統,但只是對接觸網某些關鍵部位進行溫度檢測。文獻[6]西安理工大學熊磊開發了一套基于紅外熱像儀的接觸網載流溫度監測管理系統,對實現自動化監測具有重要意義。
由于機車在行駛過程中遇到道路岔口需要頻繁換線,為了解決在行車過程中弓網脫離引發的安全事故,本文提出了一種接觸網目標檢測與跟蹤算法,能夠實時、快速地檢測接觸網,并能準確地跟蹤接觸線。
1 算法概述
本文算法主要分為接觸線檢測和參數提取并跟蹤兩部分。檢測部分首先對輸入的幀做灰度化處理,然后分別運用OTSU 自適應閾值分割和邊緣檢測兩種方法提取接觸網的邊緣特征,最后利用Hough 變換連接直線邊緣。由于在紅外視頻圖像序列中,接觸線和承力索絕大多數都是成雙成對出現的,且在視頻畫面上都是呈直線型的,所以接觸線和承力索在視覺上無顯著特征,從而對目標接觸線的跟蹤具有一定的難度。因此,跟蹤部分主要是利用Hough 變換提取目標接觸線的參數和利用卡爾曼濾波方法跟蹤參數兩個部分。參數提取部分首先利用Hough 變換法記錄候選直線參數,根據采集到的紅外視頻,發現采集的視頻圖像中接觸網導線出現在畫面中近似直線,且一般是2~4 根,所以需要根據直線數目分情況討論,然后進行判別并提取接觸網目標直線參數;參數跟蹤部分通過卡爾曼濾波器預測紅外圖像中接觸線的參數,再求取實際接觸線的測量參數,并將參數與接觸線進行一一配對,最終實現了紅外視頻中接觸線的檢測與跟蹤。一種接觸網目標檢測與跟蹤算法流程如圖1 所示。

2 接觸線檢測
2.1 圖像預處理
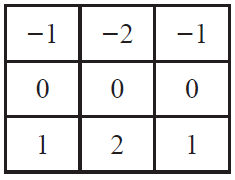
首先,將紅外圖像(見圖2a)轉換為灰度圖像(見圖2b),可以增強圖像中的特征信息,并提高圖像處理的工作效率,同時也便于對圖像進一步處理(如:圖像去噪、圖像分割等)。其次, 利用大津法自適應求得圖像閾值,進行分割后得到二值圖像(見圖2c)。大津法是圖像分割中閾值選取的最佳算法[7],運算簡單,不受圖像亮度和對比度的影響,因此在數字圖像處理上得到了廣泛的應用。最后,為了獲取圖像的邊緣信息, 采用prewitt邊緣檢測算法[8]提取接觸網的邊緣特征信息,得到二值化的邊緣圖像(見圖2d)。Prewitt 邊緣檢測算子對噪聲具有一定的抑制能力,對噪聲較多和灰度漸變的圖像處理產生了較好的邊緣效果。充分利用OTSU 自適應閾值分割和Prewitt 算子在紅外圖像邊緣檢測中的各自優勢進行特征提取,相比傳統的邊緣檢測算法,具有邊緣細節更清晰、背景噪聲更小等優點,能夠更完整、更精確地提取邊緣信息。

(a)紅外圖像

(b)灰度圖像

(c)Otsu分割

(d)Prewitt算子

(e)log算子

(f)sobel算子

(g)kirsch算子

(h)roberts算子
圖2 紅外圖像預處理效果圖示
2.2 接觸線的邊緣連接
圖像采集的視頻是由紅外攝像機拍攝的,采集的圖像容易受自然界中的光照和機車運行過程中的強電流、電壓磁場等干擾,導致獲取的圖像具有很多噪聲。由于接觸網導線和受電弓滑板相互摩擦產生磨損等原因,使得邊緣檢測后的直線邊緣出現中斷或者產生了很多偽邊緣。因此,常見的做法是在邊緣檢測后緊跟著做邊緣連接[9],形成連續的、有意義的邊緣。由于接觸線和承力索基本上都是成雙成對出現,且絕大部分情況都是呈直線型地呈現在視頻畫面中,因此本文選用Hough 變換[10-12]連接接觸線的邊緣,優點是對噪聲不敏感,能較好地處理圖像中局部被遮擋和覆蓋的情況。Hough 變換法邊緣連接結果如圖3 所示。

(a)紅外圖像

(b)Otsu+Prewitt邊緣檢測

(c)邊緣連接結果

(d)邊緣連接的局部放大圖
圖3 邊緣連接實驗結果圖
3 接觸線跟蹤
視頻圖像中接觸網安全運行是機車行駛的可靠性和安全性的關鍵,在電氣化鐵路高速、重載發展中占據非常重要的位置。由于接觸線和承力索絕大多數都是成雙成對出現且判別性較弱,在接觸線跟蹤過程中出現道岔口需要換線或者橫支架部分遮擋等情況時,對目標接觸線的跟蹤具有一定的難度。因此,提出在紅外視頻的各幀中利用Hough 變換檢測直線的優勢來提取接觸線的參數,進而使用Kalman 濾波實現對接觸線參數一幀幀地持續跟蹤,從而彌補接觸線和承力索在視覺上無顯著特征的不足。
3.1 接觸線的參數提取
Hough 變換是一種估計直線參數的方法,其抗噪性能力強 , 對直線斷裂、局部遮擋等缺陷不敏感[13]。接觸線的檢測問題,經過Hough 變換變成了對參數空間中半徑ρ 參數和角度θ 參數的求取過程。通過對候選直線參數的ρ 和θ 進行分析,發現圖像中直線對應的點皆在第一象限中,且目標接觸線的ρ 和θ 在參數空間(極坐標系)中的數值是最大值。根據采集到的紅外視頻中受電弓與接觸線的運行狀態,發現采集的視頻圖像中接觸網導線出現在畫面中呈直線型,且直線數目一般是2-4根,所以需要根據直線數目分情況討論,然后進行判別并提取目標直線參數即接觸線參數。由此可知,可以將圖像空間中較為困難的全局檢測問題轉化為參數空間中相對容易解決的局部峰值檢測問題[14]。
3.2 接觸線的參數跟蹤
本文利用卡爾曼濾波器[15]預測接觸線的參數來估計出其目標接觸線的軌跡位置并對得到的參數數據進行修正。在采集的紅外視頻幀中,將目標接觸線理解為一個包含參數空間中半徑和角度的向量,從當前幀通過協方差矩陣推測出下一幀的參數預測值,即估計出下一幀中接觸線的軌跡位置。確定卡爾曼增益系數對參數的估計值和預測誤差進行修正,接著進入下一次迭代過程。卡爾曼濾波預測接觸線軌跡算法流程如圖4 所示。

假設紅外視頻中目標接觸線在s 幀的參數可以用一個向量Peak(s,:) 來表示,其中rho_max 表示其接觸線參數的極坐標系下半徑最大值,theta_max 表示其接觸線參數的極坐標系下角度最大值。

如果已知s-1 幀目標接觸線的參數預測矩陣即將向量Peak 測量值賦值給x,s 幀接觸線的參數觀測矩陣可以用以下公式來表示
![]()
式中:x1(s,:) 是在第s 幀接觸線參數的預測矩陣,A 表示由s-1 幀最優估計x(s-1) 推測出第s 幀接觸線軌跡的參數觀測矩陣,w 為預測模型的過程噪聲,B 為控制矩陣,表示控制量w 如何作用于當前狀態。由于是對紅外視頻中目標接觸線參數的預測,這里通過一個均值為0 的高斯噪聲來模擬預測時產生的誤差。視頻中每一幀的不確定性都是通過狀態噪聲協方差矩陣來表示,預測參數時必定是不準確的,本文通過狀態噪聲協方差矩陣Q 來表示預測過程中產生的誤差,該誤差包含一些不確定因素,預測誤差協方差矩陣為
![]()
式中,p1(s,:) 為下一幀接觸線位置參數的預測誤差協方差矩陣,p(s-1,:) 為前一幀位置參數最優估計的觀測誤差協方差矩陣,A 為上一幀最優估計預測第s 幀接觸線軌跡的參數轉移矩陣的轉置矩陣。在紅外視頻中,接觸線在實際檢測中無論如何都避免不了誤差,通過Hough 變換檢測的接觸線嚴格來說也只是對接觸線參數的預測估計。Kalman 由預測過程和測量修正兩部分組成,估計過程中包含接觸線當前位置參數的預測和誤差協方差的預測。濾波器修正部分主要是對預測狀態的更新,包括Kalman 濾波增益的更新,利用K(s) 對位置參數值和協方差修正。
卡爾曼增益表達式為
![]()
式中,k(s) 為第s 幀的卡爾曼濾波常數,R 是參數觀測噪聲協方差矩陣,即參數的測量誤差,H 是真實參數到預測參數的預估觀測值的參數轉移矩陣。
推測出接觸線下一幀位置參數的最佳估計值的數學表達式為
![]()
式中,x1(s,:) 是第s 幀接觸線實際軌跡的參數推測值,y(s,:) 是第s 幀接觸線參數的實際測量值即參數觀測值。
最后,更新紅外視頻圖像中接觸線的實際位置參數與檢測位置參數之間的誤差協方差矩陣,即更新預測誤差協方差矩陣,數學表達為
![]()
由上面分析可知,卡爾曼濾波所用信息都是時域內的量, 所以卡爾曼濾波器是在時域內設計的, 且適用于多維情況。本文采用卡爾曼濾波器預測當前視頻幀接觸線的參數來估計接觸線的軌跡位置,如果在紅外視頻某一幀中沒有檢測到接觸線的參數,同時又沒有預測到接觸線的參數時,則舍棄記錄該視頻幀接觸線軌跡位置。
4 實驗結果
本文實驗采用MATLAB R2018a 進行仿真,運行環境為:CPU:Intel Core i5-8250U@ 1.6 GHz 1.8 GHz,內存:8G,Windows10 操作系統。使用MATLAB 仿真實現MP4 接觸網視頻文件到序列幀的轉換,如圖5 所示。以此序列圖片為例,成功實現了對接觸線的跟蹤。實驗結果表明該算法準確性好,跟蹤效果顯著,在電氣化鐵路高速發展及接觸線檢測和跟蹤研究中有較好的應用價值。
5 結語
由于機車在行駛過程中需要頻繁換線從而保證機車高速安全運行,本文提出了一種高速鐵路接觸線檢測與跟蹤方法,以解決在行車過程中弓網脫離而引發的安全事故,并克服了多個相似運動目標同時運動復雜情況問題。為了能夠實現對紅外視頻中接觸線的準確跟蹤,利用Hough 變換提取直線參數和卡爾曼濾波跟蹤參數,但尚不能做到自適應檢測。Hough 變換檢測速度仍然有上升空間,另外卡爾曼濾波跟蹤參數部分,在接觸線運動特征變化不大的情況下跟蹤較為穩定,但在目標位置出現遮擋嚴重等背景復雜情況下跟蹤效果不佳,需要在后續工作中進一步研究。
參考文獻:
[1] SINHA A,KIRUBARAJAN T,BAR-SHALOM Y.Application of the Kalman-levy Filter for Tracking Maneuvering Targets[J].IEEE Trans. on Aerospace and Electronic Systems,2007,43(3):1099-1107.
[2] 楊德江.高速鐵路接觸網檢測技術研究[J].建材與裝飾,2020(02):253-254.
[3] 陳高華,卓東風,夏錫瑞.基于Hough變換直線檢測中的峰值提取[J].太原科技大學學報,2006(04):256-258.
[4] 何正友,程宏波.高速鐵路牽引供電系統健康管理及故障預警體系研究[J].電網技術,2012,36(10):259-264.
[5] 閻玲玲,金立軍,張文豪,等.基于表面溫度法的接觸線磨耗紅外診斷[J].機電工程,2011,28(12):1426-1429.
[6] 熊磊.基于紅外熱像儀的接觸網載流溫度監測管理系統的開發[D].西安:西安理工大學,2017.
[7] CAO J,CHEN L,WANG M,et al.Implementing a Parallel Image Edge Detection Algorithm Based on the Otsu-Canny Operator on the Hadoop Platform[J].Computational Intelligence & Neuroscience,2018(3):1-12.
[8] 安建堯,李金新,孫雙平.基于Prewitt算子的紅外圖像邊緣檢測改進算法[J].杭州電子科技大學學報(自然科學版),2018,38(05):18-23+39.
[9] 吳銳,黃劍華,唐降龍,等.基于灰度直方圖和譜聚類的文本圖像二值化方法[J].電子與信息學報.2009,31(10):2460-2464.
[10] SATZODA R K,SATHYANARAYANA S,SRIKANTHAN T,et al.Hierarchical additive hough transform for lane detection[J].IEEE Embedded Systems Letters,2010,2(2):23-26.
[11] 王紹霖,付永生.Hough變換邊緣參數提取算法[J].同濟大學學報(自然科學版),1996(04):471-474.
[12] 劉春閣.基于Hough變換的直線提取與匹配[D].阜新:遼寧工程技術大學,2009.
[13] 許龍.基于設備維修策略的接觸網管理信息系統的研究[D].成都:西南交通大學,2013.
[14] 王紹霖,付永生.Hough變換邊緣參數提取算法[J].同濟大學學報(自然科學版),1996(04):471-474.
[15] 郭玲紅,李亞立.基于卡爾曼濾波的動目標運動參數跟蹤測量[J].自動化技術與應用,2012,31(08):20-23.
(本文來源于《電子產品世界》雜志2021年1月期)








評論