摩托車用直流無刷起動磁電機及驅動電路設計

目前電起動摩托車上起動電機和磁電機是2臺獨立的電機。起動電機為有刷永磁直流電動機,工作轉速高,需經減速機構和超越離合器與發動機曲軸相連。磁電機飛輪永磁轉子與發動機曲軸直接相連,起到發電和給發動機點火系統提供點火觸發信號的作用。發動機結構復雜,超越離合器打滑時會嚴重影響摩托車的起動特性;起動電機通過電刷換向,電刷磨損嚴重,需要經常維護。
直流無刷起動磁電機是將直流無刷起動電機與磁電機合二為一。它省掉了減速機構和超越離合器,簡化了發動機結構,提高了運行可靠性。使用它可輕易地將腳踏摩托車改裝成電起動摩托車。但摩托車的價格越來越低,這就要降低直流無刷起動磁電機成本,電機磁瓦應選用鐵氧體磁鋼,而不采用釹鐵硼材料。
2 總體結構
直流無刷起動磁電機為內定子及飛輪永磁外轉子結構,其結構示意圖如圖1所示。

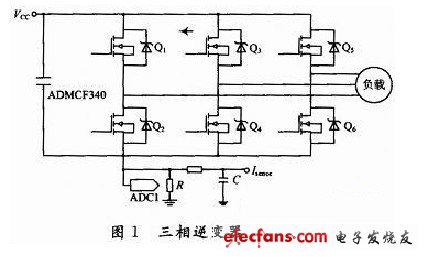
直流無刷起動磁電機的Y接三相繞組與三相半橋驅動電路聯接,位置傳感器上的3個開關型霍爾元件發來的位置信號經過處理后控制三相半橋驅動電路導通與關斷,實現直流無刷起動磁電機電子換向。摩托車起動時,直流無刷起動電機部分由電池供電。摩托車起動后,直流無刷起動電機部分斷電,單相發電繞組輸出的大小及頻率隨飛輪轉速變化的電勢需經調壓器給電池充電,同時給摩托車其它電器供電。
3 定子結構
直流無刷起動磁電機為內定子結構,電機軸向尺寸有限,結構非常緊湊。
以前,為了降低繞組端部高度,設計中采用了圖2所示短距集中繞組方案[1],即每對磁極下有3個齒,每相1個齒,每個齒上套一相集中繞組,三相繞組在空間上不存在重疊區域。圖中A、B、C和F分別代表A、B、C三相起動繞組和交流發電繞組。雖然電機生產加工工藝簡單,但繞組實際跨距為120°電角度,繞組系數較低,每相繞組基本電磁轉矩梯形波的平頂部分最寬為60°電角度,三相繞組的合成基本電磁轉矩脈動量較大,再疊加上磁阻轉矩,最大電磁轉矩與最小電磁轉矩相差近1倍,為使最小起動轉矩大于規定值,只好采用釹鐵硼磁瓦,電機成本高,且性能不佳。
現在采用圖3所示多層整距分部繞組方案。齒槽比短距集中繞組方案多1倍,即每對磁極下有6個齒槽,每相2個槽。先在底部繞屬于A相槽的A相這一層部分繞組,然后再繞屬于B相槽的B相那一層部分繞組,再繞屬于C相槽的C相那一層部分繞組;隨后再按上述規律繞屬于A、B、C相另外一層部分繞組。每相部分繞組即可串聯也可并聯,但每條并聯支路串聯匝數要相同。最后,再在屬于A相槽中繞交流發電繞組。雖然繞組繞制工藝復雜了,但它卻能有效地降低繞組端部高度,增加鐵心有效長度,且繞組系數為1,繞組利用率高。當鐵氧體磁瓦的極弧角度大于120°電角度時,每相繞組基本電磁轉矩梯形波的平頂部分大于120°電角度,三相繞組的合成基本電磁轉矩為一恒定值。鐵氧體磁瓦產生的磁阻轉矩也較小,再適當增加軸向鐵心長,也能保障最小起動轉矩大于規定值,滿足設計要求,成本低。



評論