基于模糊控制的有源濾波器直流母線電壓控制

針對傳統直流側電壓控制方法存在超調量和靜差較大的問題,設計了混合有源電力濾波器控制系統,建立了混合有源電力濾波器的系統模型,并針對直流側電壓控制設計了一套雙模糊控制器,與傳統直流側電壓控制方法相比,該控制方法具有超調小、響應速度快、靜差較小的特點。仿真結果驗證了該方法的正確性和可行性。
關鍵詞 混合有源電力濾波器;直流側電壓;雙模糊控制器
隨著大量非線性負載接入電網,諧波問題成為影響電力系統安全和電能質量的重要因素,電力諧波治理日益受到重視。
目前對APF直流側電壓多是采用PI控制或模糊控制,但PI控制依賴于系統精確的數學模型,魯棒性差、易引起電壓超調和電流沖擊;模糊控制不依賴被控對象的數學模型,穩態效果也比常規的PI控制效果好,但缺點是動態過程中直流側電壓控制效果不理想。
文中建立了混合有源電力濾波器的仿真模型。針對直流側電壓控制系統設計了一套雙模糊控制器。仿真結果表明,該有源電力濾波器能有效地消除諧波電流,同時具有良好的動態補償特性。
1 源濾波器工作原理及主電路設計
混合有源濾波器的基本原理是從補償對象中檢測出諧波電流,由補償裝置產生一個與該諧波電流大小相等而極性相反的補償電流,從而使電網中只含有基波,達到濾波的目的。
并聯混合有源電力濾波器原理如圖1所示。該混合型有源電力濾波器由LC無源濾波器和有源濾波器兩部分組成。混合型APF以電壓型逆變器作為其有源部分,與無源部分和負載并聯接入電網。

特定次諧波主要由無源濾波器消除,采用多個單調諧濾波器組成,單調諧濾波器的調諧頻率根據被補償對象的諧波成分確定,無源濾波器可由5次、7次和11次單調諧濾波器構成。
APF系統由指令電流運算電路、電流跟蹤控制電路、驅動電路和主電路組成。工作原理是:通過檢測負載電流Ll和電網電流Is,提取其中的諧波電流,進而通過控制三相半橋逆變器輸出與諧波電流相反的補償電流Ic,最終使Is趨近于正弦。
2 直流側電壓控制方法
2.1 雙模糊控制方法
本文提出了一種直流母線電壓的雙模糊控制方法。該方法由于控制器的增多,改善了控制性能,使系統的控制時間、動態響應加快、穩態誤差變小,并且算法實現簡單,滿足多種負載變化情況下的直流母線電壓控制要求。
雙模糊控制器的設計思想是從人工調節中的粗調、細調乃至微調中得到啟發而來,其結構如圖2所示。
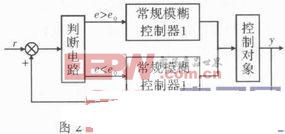
雙模糊控制器的優點在于可根據不同的運行條件,自動在模糊控制器1和模糊控制器2之間切換,這樣可以在保證系統控制精度的前提下,達到提高系統快速性、增強控制魯棒性的目的。
雙模糊控制器實現自動切換的原則定義如下:當系統電容側電壓的變化量△U大于設定值e0時,由模糊控制器1進行控制,可提高系統動態響應性能;系統進入穩態后,電容側電壓的變化量△U小于設定值e0時,切換到模糊控制器2進行控制,可更好地消除系統的穩態誤差,提高系統的穩態性能。其中,控制器的切換由電壓誤差△U及其誤差變化率du/dt控制。該控制器在保證系統控制精度的前提下,實現提高系統速度、增強控制魯棒性的目的。其中△U為直流母線電壓與其參考值的偏差。
模糊控制器根據每個采樣時刻的參數偏差及變化趨勢,基于專家知識建立的模糊規則庫,對系統作出迅速且有效的判斷,通過適當加大或減小控制力度來實現穩定控制。
模糊控制器一般只有偏差和偏差變化率兩個輸入量,本文中的雙模糊控制器均采用二維模糊控制器,該模糊控制器以誤差和誤差的變化率為輸入變量,以控制量的變化為輸出變量。由前文對有源電力濾波器直流母線電壓控制原理的討論,選擇當前的電壓Ur與參考電壓Uf的偏差△U及其變化率(du/dt)為模糊輸入變量,選擇模糊輸出變量為電網注入APF主電路的有功電流控制量Ud(△ip)。
模糊輸入量e、ec定義為
e(k)=Uf-Ud(k)
ec(k)=e(k)-e(k-1) (1)
其中,Ur(k)為k時刻的直流母線電壓;Uf為參考電壓。
在其論域上取7個語言變量,定義語言值為:{Positive Big(PB),Positive Medium(PM),Positive Small(PS),Zero(ZO),Negative Small(NS),Negative Medium(NM),Negative Big(NB)}。
對模糊輸入e、ec和輸出u進行模糊化,建立模糊子集為e,ec,u={NB,NM,NS,ZO,PS,PM,PB}
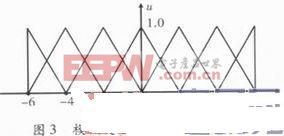
模糊控制規則是模糊控制的核心,因此,如何建立模糊控制規則成為一個關鍵的問題。本文采用MAX-MIN推理合成規則,運用IF-THEN形式的模糊條件語句,單元集模糊化重心法,輸入變量和輸出變量均采用三角形隸屬度函數。輸入變量e、ec和輸出變量u對應的隸屬度函數如圖3所示。
該模糊控制器調節過程如下:當實際測量值遠小于設定值時,則大幅增加控制量;當實際測量值遠大于設定值時,則大幅減小控制量;當實際測量值和設定值正負偏差不大時,則根據實際測量值的變化趨勢來確定控制量的大小。模糊控制器規則如表1所示。

pid控制器相關文章:pid控制器原理







評論