系統控制對象為Minas A系列MDMA152A1G交流PMSM,電機參數:額定電壓200 V,額定電流9.4 A,額定轉矩7.15 N·m,額定轉速2 000 r·min-1,np=4,定子電阻0.2 Ω,轉子慣量1.23×10-3kg·m2,磁鏈給定0.24 Wb。EKF算法的參數和初值如下:P(0)=diag(0.001,0.001,1 000,0.001);Q(k-1)=diag(0.001,0.001,1 000,0.02);R(k)=diag(25,25);x(0)=zeros(4,1)。圖3為電機在給定轉速分別為1 500 r·min-1,800 r·min-1和80 r·min-1時,空載起動的實測轉速ns與EKF觀測的轉速ng波形。其中ns是通過光電碼盤由DSP在線測得。可見,在不同的給定轉速下,電機在起動和穩態運行過程中,EKF觀測器都能較好地估計出實際轉速,電機運行平穩。電機在低速運行時,轉速有一定波動,這是因為在低速時實際需檢測的反饋信號值很小,電流諧波和A/D轉換誤差等干擾因素就顯得較為突出,使得轉速有一定波動,因此采用此方法電機在低速的運行性能不如中高速的運行性能。本文引用地址:http://www.j9360.com/article/237791.htm
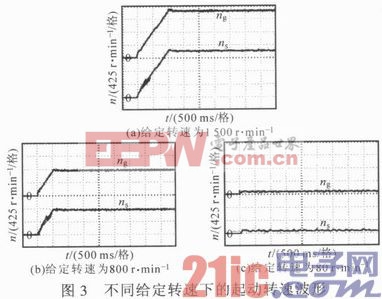
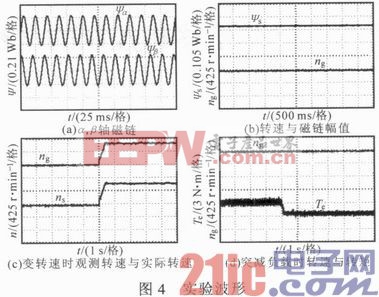
圖4a為電機在給定轉速為800 r·min-1時,空載穩定運行時EKF觀測器所觀測的ψα,ψβ波形;圖4b為ng,定子磁鏈幅值ψs波形;由圖4a,b可見,系統穩態運行時,ng,ψs與其給定值相等,且脈動很小,系統具有良好的穩態性能。圖4c為電機在給定轉速為800 r·min-1空載穩定運行情況下,將給定轉速突增為1 500 r·min-1時的ng,ns波形,可見,當給定轉速發生變化時,ng可較快地跟蹤ns變化;圖4d為給定轉速為800 r·min-1穩定運行時,突減負載時所得到的ng,Te波形,可見,突減負載時轉速幾乎沒有波動,同時也驗證了所建立的控制系統具有良好的魯棒性。
5 結論
針對永磁同步電機改進直接轉矩控制系統,采用擴展卡爾曼濾波器實現對電機磁鏈和轉速的準確估計,實驗結果表明提出的無速度傳感器直接轉矩控制策略的可行性與正確性,并可得到以下結論:①采用該方法,電機能在較寬轉速范圍內起動和穩定工作;②在轉速和負載變化過程中,擴展卡爾曼濾波器觀測出的轉速和磁鏈都能準確跟蹤給定值,控制系統靜、動態性能較好,魯棒性較強。

















評論