基于TMS320F28335的CAN和以太網接口設計

0 引言
工業現場設備復雜化,單一的串行通信使系統越來越復雜,總線控制也成為控制系統的主流,而CAN總線以其高速率,高抗干擾性成為最有前途的總線之一。基于以太網的工業控制網絡具有數據傳輸率高,可靠性好,易維護,可遠程傳輸等優點。隨著互聯網技術的普及與推廣,以太網通信速率的提高,交換技術的發展,使得它受到了全球的擁護和軟硬件的支持,因此,基于以太網的工業控制網絡是工業控制系統的發展趨勢。本文通過主流控制器TMS320F28335在已有豐富外設的基礎上,擴展了CAN總線和以太網接口,具有重要的工程價值。
1 系統硬件設計
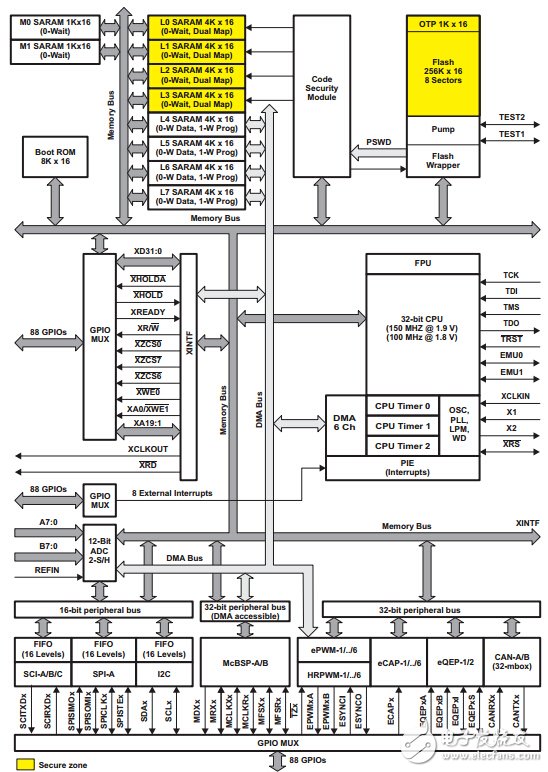
TMS320F28335型單精度浮點DSP主頻可達150 MHz,內核電壓1.9 V,I/O電壓3.3 V;片上帶有256 KB的16位FLASH和34 KB的16位SAR AM,并有128位安全密碼鑰匙鎖,保護FLASH防止固件反向工程。片上通信端口豐富,集成有3個SCI串口輸出通道,并帶有16 B的FIFO,2個多通道McBSP串口,2個增強型CAN,1個SPI總線。還帶有16通道的12位A/D轉換器等資源口(具體原理圖限于篇幅只畫CAN和以太網部分)。
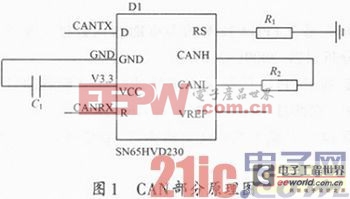
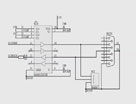
CAN驅動器選用TI公司的SN65HVD230,供電電壓為3.3 V,CAN接口部分原理圖如圖1所示。
以太網控制器選用Realtek公司的RTL8019AS,其具有集成度高,支持全雙工通信,與NE2000相兼容等特性,具有廣泛應用場合。以太網接口部分原理圖如圖2所示。

2 系統軟件設計
本文中的軟件設計主要包括三個部分:CAN驅動通信程序,RTL8019AS驅動程序和以太網協議棧移植。程序的編寫在DSP集成開發環境CCS 3.3下完成。
2.1 CAN總線驅動
2.1.1 初始化
CAN模塊使用前必須初始化,初始化需要完成的主要工作有:引腳配置;郵箱配置;波特率配置;中段功能設置。限于篇幅,初始化程序從略。
2.1.2 CAN發送
本文采用郵箱0進行數據的發送,郵箱0的ID在初始化函數中已設置(程序解釋以注釋的形式給出,下文同):
2.1.3 CAN接收
為保證數據能及時接收,像其他串行通信一樣,接收一般在中斷中完成:

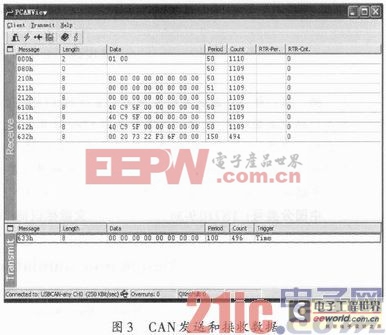
實際工作中通過PCCAN軟件觀察到的CAN發送和接收數據,如圖3所示。



評論