基于DSP的交流隨動系統設計

摘要:DSP56FS07芯片采用了不同于通用CPU和MCU的特殊軟硬件結構,實現了高速的數字處理以及實時地進行系統控制。作為控制電機的專用產品,許多片內外設的功能設置大大簡化了電機控制系統的設計。文章通過隨動控制器串口的設計、限位及制動的實現過程介紹了DSP56 F807的應用。
本文引用地址:http://www.j9360.com/article/235144.htm1 隨動系統的組成及功能簡介
交流隨動系統由交流電機、交流伺服驅動器、隨動控制器、編碼器(旋轉變壓器)、減速器等部分組成。如圖1所示。
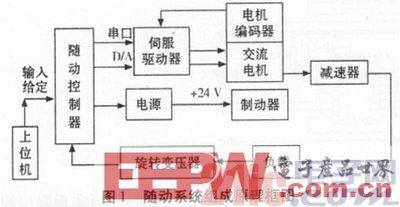
隨動控制器是由DSP芯片為核心擴展而成的。它可以接收上位機傳送的給定位置信息與編碼器采集的實際位置信息,通過前饋PID控制算法,輸出模擬電壓量送入驅動器中,實現對負載運動狀態的控制。控制器可以采集隨動轉塔的鎖定信號和限位信號,并控制隨動系統的工作狀態。
驅動器是專為交流電機設計的,內部嵌有交流電機控制算法、與交流電機編碼器構成速度環和電流環,可以利用其RS-232串口對其內部參數進行設置,比如最大加速度的設置以保證系統的響應特性;還可以接收驅動器使能信號,當使能信號為高時,控制電機鎖緊,當使能信號為低時,控制電機與減速器解脫鎖緊。
交流電機是隨動系統的執行機構,由驅動器輸出三相交流電壓,控制電機的轉速,通過減速器,最終實現對負載的位置控制。
制動器是用于在某些工作狀態或故障狀態時,為保護系統的安全性而設置的電機抱閘裝置。當控制電壓為零時,電機處于抱閘狀態,當控制電壓為+24 V時,電機處于解脫狀態。
電源為隨動系統中的各部件提供相應的電源,同時在隨動控制器的控制下,控制電機制動器的工作狀態。
本文主要介紹隨動控制器中串行接口的設計、電氣限位和制動的實現。
2 DSP56F807處理器的特點
●計算機具有獨立的數據存儲空間和程序存儲空間,支持并行處理;在80 MHz時鐘頻率下,可達到40 MIPS的指令執行速度;單指令周期可以完成16位×16位的并行乘-加運算。
●特殊的多功能DSP指令,即一條指令可以完成幾種不同的操作;針對電機控制DSP集成了許多相關的外設模塊。增加了電機控制系統的集成度,并有效地降低了系統的成本,同時還使系統的可靠性大大提高。
●支持C語言編程,C語言與匯編語言的混合編程更加靈活、方便。JTAG/OnCE程序調試接口,允許在系統設計過程中隨時進行調試,并可對軟件進行實時調試。
●電源采用3.3 V供電,但允許輸入端口使用5 V TTL電平。
3 隨動控制器
該部分的設計采用子母板架構,子板具有獨立的復位電路、時鐘電路,以及JTAG接口。母板只需要設計串口電路,鎖定、限位控制電路等。
3.1 串口電路的設計
串口電路如圖2所示。
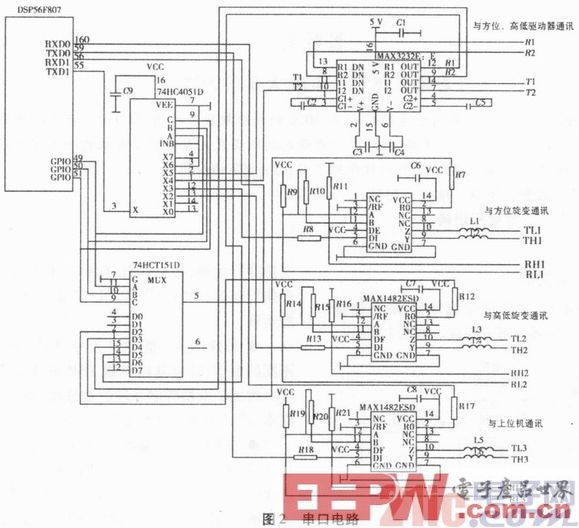
隨動控制器需要與高低、方位伺服驅動器,高低、方位旋轉變壓器以及上位機等進行通訊,而DSP56F807只有兩路串口0、串口1,遠不能滿足要求,因此需要將兩路串口擴展成為5路。
串口0的GPIO RXD0、GPIO TXD0直接通過MAX1482ESD轉換成RS-422接口,與上位機進行通信。串口1的GPIO RXD1、GPIO TXD1通過MAX3232轉換成兩路RS-232接口分別與高低、方位驅動器進行通信,通過兩片MAX1482ESD轉換成兩路RS-422分別與高低、方位旋轉變壓器進行通信。
接收選用8選一數據選擇器74HCT151D,發送選用8通道多路器74HC4051D。將DSP的GPIO管腳49、50、51做為74HCT151D和74HCA051D的輸入A、B、C經過譯碼成8路接收或發送來自不同通道的信號。
與RS-422接口通信采用MAX1482ESD低功耗收發器,接收輸出使能端RE為低,輸入A大于B,接收輸出端RO為高;反之,輸入A小于B,接收輸出端RO為低。接收輸出使能端RE為高,接收輸出端RO為高阻狀態。發送輸入使能端DE為高,發送輸入端DI為低,輸出差分信號Y端為低,Z端為高;反之,發送輸入端DI為高,輸出差分信號Y端為高,Z端為低。發送輸入使能端DE為低時,發送輸入端DI無效,輸出端Y、Z為高阻狀態。
3.2 電氣限位和制動
3.2.1 限位的種類及原理
限位在隨動系統中可分為軟件限位、電氣限位和機械限位三種。
●軟件限位就是通過軟件的分析計算,控制系統運動位置不超過設定的位置,它是限位里最低級的一種。
●電氣限位就是當系統發生故障,軟件限位沒有起到限位作用時,系統超過軟件限定的位置而繼續運動,在到達電氣限定位置時,使限位微動開關斷開,通過電路控制使制動器處于抱緊狀態,控制電機停止轉動,從而實現限位的功能。
●機械限位是通過機械結構的設計,對系統進行位置的限制。這是一種最基本也是最原始的限位方法,是系統限位的最后一道關卡。當軟件限位和電氣限位均未產生作用時,必須通過機械限位(硬碰撞)使系統停止在某一位置,保證系統的安全性。
3.2.2 電氣限位和制動的實現
圖3所示為電氣限位、鎖定電原理圖:
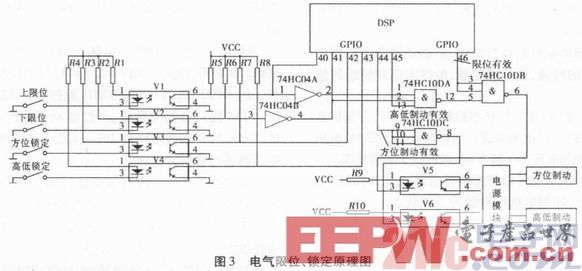
開機初始化過程中,首先通過DSP的I/O口,檢測鎖定開關是否處于閉合狀態。如果鎖定開關閉合(即鎖定器處于鎖定狀態),DSP送出方位制動命令1、高低制動控制命令0和限位控制命令1,與非門輸出為0,控制光電耦合管處于導通狀態,光電耦合管的輸出作為可控+24 V電源模塊的控制端,使電源不輸出+24 V電壓,控制電機制動器處于制動狀態。軟件將檢測到鎖定開關狀態上傳,提醒操作手解脫鎖定裝置。
如果鎖定開關處于斷開狀態時,DSP送出方位制動命令0、高低制動命令1,檢測上下限位(是指高低方向的限位,開關斷開為限位,閉合為非限位)開關是否處于閉合狀態。假設限位開關處于閉合狀態,DSP檢測到后,送出限位控制命令0,與非門輸出為1,光電耦合管不導通,電源模塊輸出+24 V,使高低電機制動器處于非制動狀態,由DSP程序控制電機轉動,系統處于正常工作狀態。
在正常工作時,DSP送出限位控制命令為1、方位制動命令為0、高低制動命令為1,使光電耦合管V5的導通與否受限位開關的控制,當上、下限位開關處于閉合狀態時,光電耦合管非導通,電源模塊輸出+24 V,使電機制動器處于非制動狀態;只要上、下限位開關其中之一處于斷開狀態,光電耦合管導通,電源模塊輸出為0 V,電機制動器處于制動狀態,從而保護整個系統的安全。
4 結束語
串口電路通信功能正常,鎖定、限位控制電路穩定有效,整套電路已成功應用于某型武器系統中。實踐證明,作為電機控制的專用芯片DSP56F807具有以下優勢:較高的運算速度能夠滿足電機高性能的控制算法;較大的片內存儲空間(基本不需要外擴存儲器)降低了用戶成本并且提高了程序安全性;高度集成的片內外設增加了電機控制系統的集成度使系統的可靠性大大提高;良好的軟件開發環境,提供了大量的專用函數庫,大大縮短了產品開發周期。

pid控制器相關文章:pid控制器原理
加速度計相關文章:加速度計原理









評論