一種基于ARM 單片機與CPLD的數字軸角轉換方法

引言 同步機.正余弦旋轉變壓器等廣泛應用于火力控制.航空航天.自動控制等領域以實現系統間軸角信息的傳輸.由于計算機技術在上述領域的廣泛應用,數字-軸角轉換已(Digitalto Shaft-angle Converting,DSC)成為一個重要的問題.市場上DSC集成模塊產品價格較高且接口不夠靈活,在某些領域應用受到限制,特別在多路DSC使用時效費問題更為突出.基于上述問題,提出一種采用ARM 單片機+CPLD實現數字-軸角轉換的方法.
本文引用地址:http://www.j9360.com/article/228339.htm1 數字-軸角轉換原理數字-軸角轉換(DSC)是將數字形式表示的軸角度θ通過運算電路轉換為正余弦旋轉變壓器形式的電壓(如式(1)),經正余弦旋轉變壓器和經過Scott變壓器后驅動同步機指向對應軸角位置,從而完成數字-軸角轉換.
當同步機.正余弦旋轉變壓器的激磁繞組電壓為U0 =Umsinωt時,則正余弦旋轉變壓器兩相繞組輸出電壓為:
URS =KRUmsinωtsinθ
URC =KRUmsinωtcosθ
驅動同步機三相繞組電壓為:
US1 =KSUmsinωtsinθ
US2 =KSUmsinωtsin(θ+120°)
US3 =KSUmsinωtsin(θ-120°)
其中,KR ?KS分別為正余弦旋轉變壓器和同步機的變壓比,θ為軸角位置.
為了將兩相正余弦旋轉變壓器信號變為三相同步機信號,需使用Scott變壓器.其基本構造及原理分析如圖1所示.
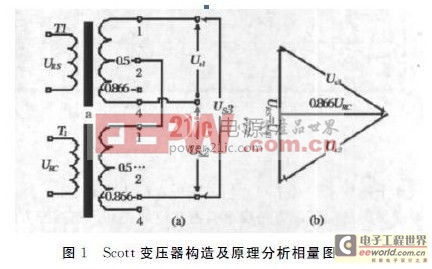
在圖1 (a)中,URS ?URC是空間兩相正余弦旋轉變壓器信號,將兩變壓器按圖中抽頭連接,如圖1 (b)的相量圖分析:
Us1 =URS
US2 =-0.5URS -0.866URC
US3 =-0.5URS +0.866URC
這樣就將空間兩相正余弦旋轉變壓器信號轉變為空間的三相同步機信號.2 硬件設計
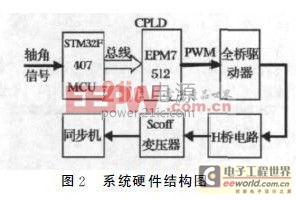
2.1 總體設計
以一路DSC為例,系統的硬件結構如圖2所示.工作原理為:STM32F407微控制器為主控芯片,通過通信接口接收外部輸入的軸角信號θ,并對其進行粗精分離及利用查表法計算對應占空比大小,通過總線方式將通道對應地址及占空比對應數據信息送入CPLD;CPLD根據數據及地址信息產生對應通道和占空比的PWM 信號;由4個互補MOS管構成的全橋驅動電路由全橋驅動器UBA2032根據PWM 信號控制全橋電路開斷,并經選頻電路后產生對應軸角的調制波,經Scott變壓器轉變為三相信號后驅動同步機指向對應軸角位置即完成系統的數字-軸角轉換.
2.2 STM32F4微控制器
STM32F4微控制器是由意法半導體生產的基于ARMCortex-M4內核的新型微控制器,性能優越.下面主要說明選用此型號MCU的原因:
(1)內核架構先進,性能優越.由于MCU需要完成諸如軸角粗精分離.取整以及調制波對應PWM 信號占空比等運算,涉及到較多乘除法運算,要求所選MCU需具備較強浮點及乘除運算能力,而所選STM32F4微控制器具有專門的硬件乘法器和具有較高的主頻(168MHz),且可適當超頻,適合完成較為復雜的實時運算;(2)接口豐富,可方便完成功能擴展.RS232串口用于接收外部信息,同時,此型號MCU具有網絡接口,可在系統組網時作為網絡節點;(3)可變靜態存儲控制器(FSMC),是STM32系列采用的一種新型的存儲器擴展技術,可根據不同的外部存儲器類型通過設置進而匹配信號的速度,達到方便擴展.使用靈活的目的.系統中通過數據/地址/控制三總線方式與CPLD通信.
在多路DSC中,通過地址總線傳遞所選通道號,數據總線傳遞對應此通道相應軸角調制波的PWM 信號的占空比,控制總線傳遞相應控制信號.
2.3 CPLD電路如果利用MCU產生PWM信號,由于其需擔負大量運算工作,會增加MCU的負擔從而系統的實時性與穩定性均可能得不到保證,因此需要專門產生PWM信號的單元.CPLD是可編程邏輯器件,器件的時延特點較為固定,信號輸出穩定性及實時性均可得到保證,因此使用CPLD完成PWM信號的生成.
2.4 全橋電路及選頻電路
全橋電路由兩對互補連接的MOS管組成,具有丙類功率放大的特征,發熱低.效率高.工作時由PWM 信號驅動全橋驅動器UBA2032產生控制全橋電路橋臂開斷時間,從而產生不同有效值的電壓.50%的占空比對應調制波的零值,為了保證UBA2023的工作及MOS管的正常開斷,通常PWM 信












評論