單相UPS逆變器復合控制策略

1.引言
本文引用地址:http://www.j9360.com/article/228054.htmUPS通常用在對電源質量要求很高的場合,如金融部門、醫療中心、通信系統、軍用設備等。一般要求UPS的輸出波形質量好,動態響應快,抗擾能力強。近年來,中外學者發展出了多種逆變電源波形控制技術:PID控制,無差拍控制,滑模變結構控制,重復控制,模糊控制等。各種控制方法均具有各自的特點,表現出優良的特性和不足。本文針對UPS逆變電源波形不能兼顧穩態效果和動態效果的問題,建立了單相逆變器的數學模型,提出了基于重復控制和模糊PI控制相結合的新型控制策略。利用重復控制消除逆變器周期性干擾,提高其穩態精度,利用模糊PI控制改善逆變器對非周期擾動的瞬態響應速度。實驗結果表明,基于該控制器控制的UPS輸出波形質量好,穩態精度高,動態響應快。
2.單相全橋PWM逆變器的結構
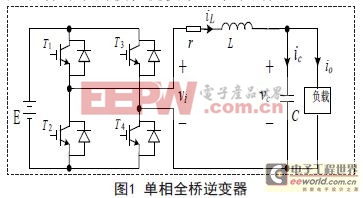
單相全橋逆變器主電路結構如圖1所示。
圖中,T1~T4為IGBT開關器件,E為直流輸入電壓,濾波電感L和濾波電容C構成低通濾波器,電阻r與濾波電感L相串聯,它為死區效應和各環節的損耗提供了一個小的阻尼。
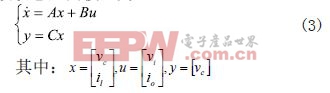
選取電容C與電感L作為狀態變量,根據基爾霍夫電壓定理KVL和電流定理KCL,我們可以得到逆變器的數學模型如下:

得出單相逆變器的連續時間狀態方程:

由此狀態方程我們可以得到逆變器通用連續狀態空間模型為:
3.模糊PI控制器
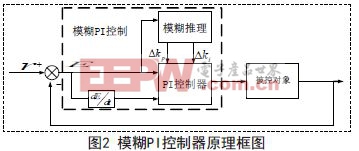
模糊PI控制器主要由參數模糊化、模糊推理、解模糊和PI控制器組成,圖2示出其原理框圖。本文采用二維結構模糊控制器,以采樣信號與參考信號的誤差e和誤差的變化率ec為輸入量,以控制量的變化為輸出量,這樣的模糊PI控制結構簡單,動態控制性能良好。接下來將輸入量進行模糊化處理得到誤差E和誤差的微分量EC,控制器的輸出量為p Δk , i Δk .先找出p Δk , i Δk 與E和EC之間的模糊關系,再根據模糊控制規則進行模糊推理,對參數進行在線修正,將算出的參數代入下式計算:

式中0p k , 0i k 為PI參數的初始設定值,由控制系統的特性決定。
建立模糊規則的原則是使系統輸出響應的動靜態特性達到最佳:當誤差大或較大時,選擇控制量以盡快消除誤差為主;當誤差較小時,選擇控制變量要以系統的穩定性為主,防止系統超調。因此通過仿真和實驗設計可得到針對p Δk , i Δk 的模糊規則表。
4.重復控制器設計
重復控制是基于內模原理的一種控制方法,包括重復信號發生器模塊和補償器模塊。
它將重復信號發生器作為周期性擾動信號植入控制系統中,能有效實現系統的無靜差跟蹤控制。本設計采用改進型重復控制器,即在重復信號發生器內模中附加一濾波器,如圖3所示。

圖3中,r為逆變器給定信號,y為逆變器輸出電壓,e為誤差信號,d為死區、負載等其它周期性擾動等效信號,z?N為周期延遲環節,N為一個工頻周期的采樣次數,Q(z)通過正反饋環節將誤差信號進行周期性累加,它可以是一個略小于l的參數或低通濾波器,工程上常取Q(z)=0.9.z?N和Q(z)構成了重復信號發生器。C(z)為重復控制環路補償器。
補償器C(z)根據控制對象P(z)的特性設置,在檢測到上一周期的誤差信息后,補償器C(z)負責在下一周期給出幅值相位準確的控制量。通常可以采用以下形式實現:

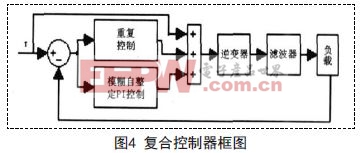
其中: r K 為可調增益。r K 越小,穩定裕度越大;反之, r K 越大,誤差收斂速度越快,穩態誤差越小,本文r K 取為0.86.zk為超前環節,是補償器C(z)進行相位補償所必需的,本文k取6. ( ) 1 C z 常取為一個截止頻率與P(z)近似的二階低通濾波器以實現高頻衰減,提高穩定性和抗高頻干擾能力。與模糊PI自整定控制構成復合控制器如圖4所示。
5.仿真實驗分析
本文研究一個11KV的UPS電源,基本技術參數如下:直流母線電壓E=380V;額定輸出電壓UO=220V;額定輸出電壓頻率:f=50Hz;額定輸出功率:P=11KVA;輸出濾波電感:
L=0.43mH;輸出濾波電容:C=140uF;等效阻尼電阻:r=0.1Ω,PWM開關頻率fSW=10KHz.
基于MATALAB仿真軟件進行仿真試驗。

由圖5可知,穩態時,穩態精度為0.14%,T H D = 0 . 1 1 %;半載突加滿載時電壓跌落為19.8V,電壓變化率為6.4%.
6.結論
本文針對UPS逆變電源,提出一種將重復控制與模糊PI控制相結合的控制策略,并通過仿真實驗驗證了該方法的可行性,結果表明所采用的控制方案使UPS的輸出電壓穩態精度高,穩態誤差小,動態響應快。諧波畸變較小,獲得了預期效果。

pid控制器相關文章:pid控制器原理
低通濾波器相關文章:低通濾波器原理



評論