MM74HC4046在感應加熱電源中用法的改進

結合國家節能減排政策,感應加熱方式具有節能,熱污染小,加熱速度快等優點,已經逐漸代替傳統電阻絲加熱方式應用于各種工業透熱場合,特別是在注塑機、造粒機、拉絲機等設備上的應用尤為廣泛。目前大多數應用于上述設備的感應加熱電源普遍存在現場改造麻煩,且經過長時間工作后,因電感量變化大,而引起的加熱效率降低,故障率高等問題。為解決上述問題,并滿足上述設備的現場改造和工藝要求,對感應加熱逆變電源的功率和頻率提出了一定的要求。對于上述設備,對電流的透入深度有一定的要求。根據電磁感應定律和趨附效應,感應加熱的頻率越低,透入深度越深,感應電流越小。綜合上述因素,通過理論計算要求感應加熱頻率為20 kHz 左右。為此,本文介紹了采用IGBT 組成的5 kHz ~28 kHz ,額定電流20 A,額定功率為4 .4 kW 的感應加熱逆變電源。此電源對MM74HC4046 集成鎖相環的用法進行了改進,實現了數字化控制的它激到自激的轉換,使得電源在運行過程中能進行失鎖控制,最終保證負載電壓與負載電流穩定可靠的無相差頻率跟蹤,也保證了工件在加熱過程中,電源始終處于準諧振狀態,使感應加熱電源在實際運用中的可靠性與穩定性大大提高。
1 感應加熱電源逆變側主回路
從IGBT 超音頻逆變器實現的角度出發,結合并聯諧振與串聯諧振的優缺點與現場的實際要求,感應加熱電源的逆變側選擇串聯諧振方案,采用四只40A、600 V 的IGBT 單管VT1 ~VT4組成全橋逆變電路,其電路框圖如圖1 所示。
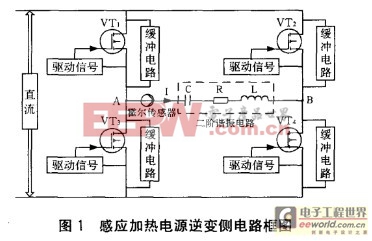
圖1 感應加熱電源逆變側電路框圖
圖1 中的C 選擇為高頻無感電容,其耐流必須超過電源的最大電流,耐壓必須超過AB 兩端最大電壓與二階諧振電路的品質因數Q 的乘積;L 選擇采用鐵氟龍高溫絕緣線繞制;R 為逆變側回路的內阻。為提高逆變器的功率因數,并減輕逆變器件的電磁應力和開關損耗,RLC 電路必須處在串聯諧振狀態。在同樣直流電壓輸入的情況下,當RLC 電路發生串聯諧振時,電流IAB最大,UAB的電壓波形為矩形波,IAB的電流波形為正弦波,UAB與IAB為同頻同相,若感應加熱電源的逆變器頻率偏離負載固有諧振頻率時,IAB的波形則為畸變的正弦波,偏離的越遠畸變得越厲害,且UAB與IAB的相位差越大。
2 鎖相環控制電路的改進
2 .1 鎖相環控制電路的設計
由于感應加熱電源的負載受到實際運用環境、以及被加熱工件的形狀和溫度特性等影響,負載的電感量L、等效內阻R 等參數在電源運行過程中是變化的,所以只有對負載的固有頻率進行穩定可靠的跟蹤才能保證感應加熱電源的效率。為此,在感應加熱電源中加入鎖相環控制部分。鎖相環包含三個必不可少的單元電路,即鑒相器、環路濾波器和壓控振蕩器。鎖相環MM74HC4046 擁有三個鑒相器。鑒相器根據實際電路設計需求,選擇鑒相器2 。鑒相器2 是上升沿觸發比較,對比較信號的占空比無要求,且鑒相器2 擁有一個三態輸出13 腳和相位差輸出1 腳。當三態輸出口13 腳輸出高阻態時,表示鎖相環處于穩定的工作狀態,3 腳和14 腳的輸入無頻率與相位差,同時相位差輸出1 腳為高電平。
MM74HC4046 鎖相環傳統的控制方法[4]并沒有充分利用上述特點,鎖相環的它激起振和它激到自激的轉換只能在電路上電的時刻簡單地通過電容的充放電實現,且無法對鎖相環工作狀態進行有效的判斷,所以當電源在運行過程中,鎖相環如果失鎖,電源則無法在運行狀態下重新使鎖相環進入正常頻率跟蹤狀態。為解決上述問題,本文對傳統MM74HC4046 在感應加熱中的用法進行了改進,鎖相環控制電路原理框圖如圖2 所示,虛框部分為相對傳統控制原理的改進部分。
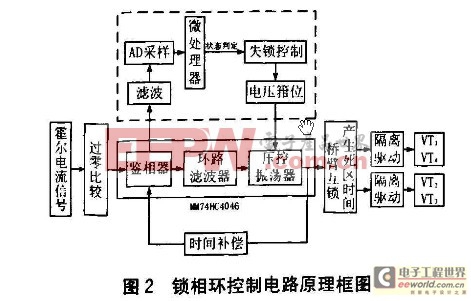
圖2 鎖相環控制電路原理框圖
結合改進的控制原理框圖,將傳統的它激起振和它激到自激轉換方法由純模擬控制改為數字化控制方法,設計出了圖3 所示的MM74HC4046 鎖相環的主要外圍控制電路,使得可以通過微處理器實時檢測和調整鎖相環工作狀態,提高了電源啟動的可靠性與穩定性。
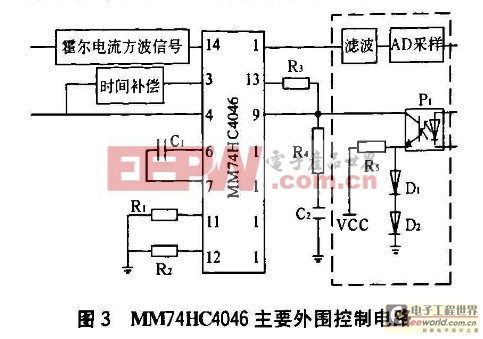
圖3 MM74HC4046 主要外圍控制電路
首先,根據IGBT 在額定電流所能承受的最高頻率,加熱工件的頻率等實際要求,調整R2和C1的大小確定鎖相環輸出的最低頻率,再確定R1的大小,使鎖相環輸出的中心頻率和最高頻率達到要求。其次,根據實驗所測,圖4 所示的9 腳電壓與壓控振蕩器輸出頻率的關系,確定9 腳最佳起振電壓,使得9 腳電壓為起振電壓時,壓控振蕩器輸出頻率在其中心頻率附近,且反饋的霍爾電流信號能夠大于一定的電壓值,使得電源啟動更加容易,因此設計出圖3 中虛框內的電路。最后,確定鑒相增益、壓控增益和鎖定時間,計算出二階PLL 中環路濾波器的參數R3 、R4和C2 。
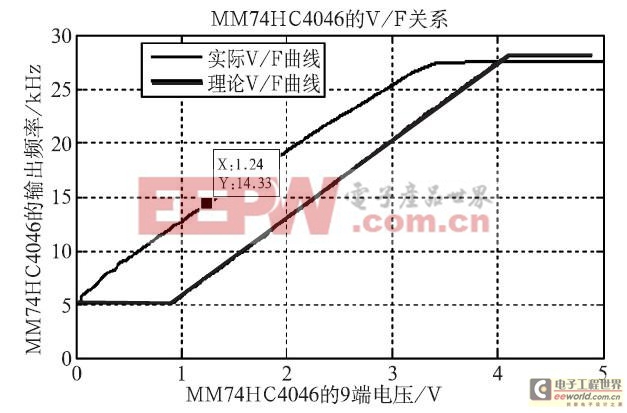
圖4 9 腳電壓與4 腳輸出頻率關系曲線
利用圖1 中的霍爾傳感器檢測出負載的電流信號,并定義由A 至B 為正方向,電流信號經過濾波和過零比較處理后,得到與霍爾電流信號同頻同相的方波信號,加載到MM74HC4046 的14 腳,4 腳的輸出信號經過時間補償后加載到3 腳,3 腳信號與14 腳信號進行相位比較,產生的相位差與9 腳的平均電壓呈線性變化。同時4 腳的輸出信號經過橋臂互鎖與隔離驅動后分別加載到VT1 ~VT4 ,并保證VT1和VT4的驅動信號的方向與定義的正方向一致。
2.2 它激到自激轉換的實現
在MM74HC4046 上電瞬間,無霍爾電流信號,壓控振蕩器以最低頻率輸出,若反饋霍爾電流信號大于一定的電壓值,鎖相環則進入自激狀態。但在實際應用中,受到各種環境和條件的影響,鎖相環可能在運行過程中出現失鎖,此時9 腳的電壓為MM74HC4046的供電電壓,且壓控振蕩器輸出最高頻率;13 腳輸出不再是穩定的三態輸出;1 腳輸出為表示14 腳與3 腳相位差的脈沖信號,該脈沖信號的占空比與絕對相位差呈線性關系。由于傳統它激啟動和它激到自激的轉換方法的不足,使得感應加熱電源的穩定性和可靠性不能得到有效的保證。
為彌補傳統方法的不足,本文利用MM74HC4046自身的特點,首先,對1 腳的輸出信號進行濾波整形后,微處理器對其進行AD采樣,當其值低于某一設定的值時,可以斷定鎖相環處在失鎖狀態;隨后,微處理器對光耦P1進行控制,通過虛框內的兩個二極管VD1和VD2管壓降的箝位,電阻R5的限流,將其9 腳電壓拉至起振電壓,使鎖相環進入它激狀態;最后,將光耦P1的狀態恢復,鎖相環則進入自激狀態,實現電源運行中的鎖相環它激到自激的轉換,完成失鎖控制,保證負載電壓與負載電流的無相差跟蹤。
3 實驗結果
根據實際要求,選用40 A、600 V的IGBT 作為逆變器件。設計鎖相環的壓控振蕩器輸出的最低頻率為5 kHz ,最高頻率為28 kHz 。負載L 為108 μH,C 為0。44 μF ,其諧振頻率在20kHz 附近。圖5 為鎖相環處于無相差跟蹤狀態的波形,其中信號U1為MM74HC4046 的1 腳輸出,可以看出U1基本保持高電平,說明14 腳與3 腳基本無相位差;信號U13為13 腳的電壓波形,可以看出其一直保持為3。49 V,說明此腳一直處于高阻態,鎖相環處于穩定無相差跟蹤狀態;信號io表示為霍爾電流信號,可以看出電流波形非常近似為正弦波;信號uo表示加載到VT1和VT4的前端驅動信號,通過與io的相位對比,可以看出此時逆變器工作于準諧振狀態,逆變輸出頻率為21。95 kHz 。圖6 為在未加緩沖電路情況下,直流電壓Uo 、負載電壓iAB和負載電流io的波形,Uo的平均電壓為104 V,UAB的最大峰-峰值為380 V,可以看出逆變器件在換流時di/dt 較小,對逆變器件造成的電磁應力與電壓沖擊也較小。
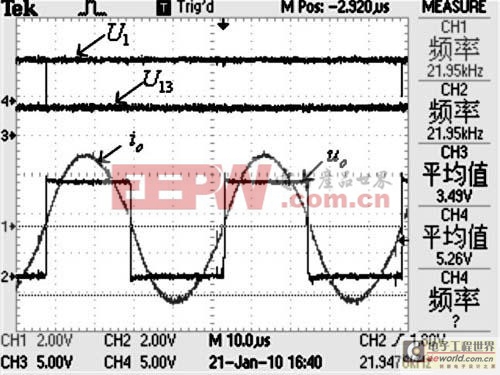
圖5 鎖相環無相差跟蹤狀態各信號波形
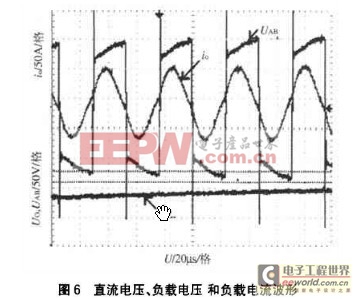
圖6 直流電壓、負載電壓和負載電流波形
4 結 論
實驗結果表明,本文對MM74HC4046 集成鎖相環的傳統用法進行了改進,在保證實現傳統逆變器的零電流諧振軟開關,減輕逆變器件的電磁應力和開關損耗的前提下,實現了數字化控制的它激

逆變器相關文章:逆變器原理
逆變器相關文章:逆變器工作原理
霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理 鑒相器相關文章:鑒相器原理 鎖相環相關文章:鎖相環原理
評論