光纖自愈環網在變電站自動化系統中的設計與實現

摘要:針對變電站自動化系統中星形光纖通信網絡存在的缺陷,提出了一套適用于該類系統的光纖自愈環網系統結構方案。設計了該方案的網絡結構、環網自愈策略及信息編碼格式,并給出了基于EPLD的具體實現方法。實際性能測試表明,該光纖自愈環網在變電站自動化系統中有著廣闊的應用前景和推廣價值。
本文引用地址:http://www.j9360.com/article/225742.htm關鍵詞:變電站自動化系統 光纖 環網 自愈 EPLD
近年來,分層分布式體系結構已成為變電站自動化系統的標準結構模式[1]。該體系結構中網絡通信于系統的功能與可靠性是影響整個系統的重要因素之一。由于變電站現場電磁環境惡劣,為提高通信可靠性,光纖通信技術越來越多地被應用于該類系統中。
目前在變電站自動化系統中應用的光纖通信網絡多為星形拓撲結構。星形拓撲結構網絡需要星形耦合器作為核心單元。該單元發生故障將導致整個通信網絡的癱瘓,而光纖的特點又決定了星形耦合器不易進行雙重化配置,無法滿足新型變電站自動化系統為提高可靠性而提出的重要節點需雙機雙網配置的要求[3]。因此支持主節點雙重化配置且具有自愈功能的光纖雙環網將是變電站自動化系統通信網絡的一個較好選擇。
變電站自動化系統對各裝置(節點)間的時間統一性有著較高的要求[3]。為了提高時間同步精度,很多該類系統都通過設置一套對時專用網絡(采用IRIG-B碼或秒脈沖)來解決[4]。這種方案在以銅纜為傳輸介質的場合不會增加太大的成本,但在采用光纖介質時,對時專用網絡的過高成本就令人難以接受了。利用光纖通道時分復用方式,開辟復用通道進行對時,可方便地解決這個問題。
基于變電站自動化系統通信網絡的上述特點,本文提出了一套適用于該類系統的光纖自愈環網系統結構方案,設計了該方案的網絡結構、環網自愈策略及信息編碼格式,并給出了基于EPLD的具體實現方法。
1 系統總體設計
1.1 光纖環網結構
光纖環網結構如圖1所示。
整個網絡為主、從式結構。在變電站自動化系統中,主節點一般是通過處理機,從節點為各種測控置或自動裝置。為了確保通信的可靠性,主節點一般要求雙重化配置,但同時只能有一個主節點處于網絡主控狀態,另外的主節點工作于從節點狀態,工作狀態的轉換由兩主節間的一套雙機切換邏輯來控制。處于網絡主控狀態的主節點(簡稱主控節點,下同)產生網絡工作時鐘,從節點以這個網絡工作時鐘同步工作。每個節點發送數據均從順時針和逆時針兩個方向傳輸,自發送節點開始,主控節點終止,因此每次數據傳輸,目的節點均可從兩個方面接收到數據。為了保證數據收質量及速度,要優先選擇最先到達目的節點的相就通道進行數據接收。
1.2 環網自愈策略
當網絡的雙環者暢通時,正反兩個光纖通道的數據各自獨立傳輸,互不影響,如圖2(a)所示。當右側接收不到工作時鐘進(右側節點故障或光纖故障),則將左側所接收的數據環繞從左側發送出去,構成左側自環,如圖2(b)所示。反之,如果左側節點故障,則將右側接收的信息從右側發送出去,構成右側自環,如圖2(c)所示, 保證從節點發送的數據總線能夠傳輸到主節點,此時網絡工作于單環運行狀態。當故障區段的故障消除后,節點將自動恢復到如圖2(a)所示的雙環運行狀態。節點單元的光纖自愈控制由EPLD自動完成,無需MPU控制。
保證從節點發送的數據總線能夠傳輸到主節點,此時網絡工作于單環運行狀態。當故障區段的故障消除后,節點將自動恢復到如圖2(a)所示的雙環運行狀態。節點單元的光纖自愈控制由EPLD自動完成,無需MPU控制。
1.3 光纖通道數據編碼格式
系統設計為同步工作方式,在光纖通道中傳輸的信息編碼格式如圖3所示。
每幀由8位組成。首先是一個幀起始標志位(1),依次是IRIG-B通道、主通道、輔助通道,接下來是連續4位“0”,然后是下一幀的起始標起位。IRIG-B通道用于進行廣播方式全網對時,IRIG-B信息由主控節點發送,從節點同時接收。主通道用于問答式通信,從主通道發送的數據,主節點及所有從節點均能接收到。輔助通道用于從節點向主節點主動傳輸緊急數據和突發事件信息,以彌補主通道問答式通信方式響應速度方面的不足,提高通信子系統的響應速度。從節點在輔助通道發送的數據,只有主節點才能接收到。
2 系統實現
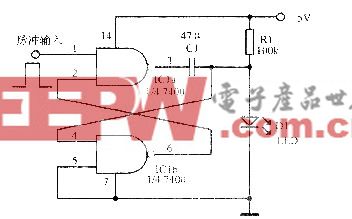
2.1 光纖環網節點硬件電路
圖4為一個光纖環網節點單元的電阻圖。該電路以電擦除可編程邏輯器件(EPLD)為核心,外圍光纖收發器件F1與F4、F2與F3分別構成方向相反的兩個環路,其中F1-F4的數據流方向為從左至右,F3-F2為從右至左。發光二極管V1、V4分別指示左右兩側通道同步狀態,V2、V3分別指示左右兩側數據接收狀態。網絡狀態指示信號SYNC_L、SYNC_R性質與V1、V4相同,用于向本節點的微處理器(MPU)提供網絡運行狀態。RX_L/R指示目前接收的數據是來自左側環路還是來自右側環路。
跳線器JP用于選擇節點的主、從工作模式。在工作于主節點方式時,NET_EN用于多重主節點間切換網絡控制權;在工作于從節點方式時,NET_EN用于選擇發送數據通道。
B_IN、B_OUT分別為IRIG_B標準時間信號(DC,1kHz)的輸入(主節點用)和輸出(從節點用)。IRIG-B標準時間編碼經常應用于需要精密時間基準的分布式監控系統中。
數據通信接口信號包括:數據接收(RXD)、數據發送(TXD)、發送使能(TXEN)、收發時鐘(TRCLK)及輔助通道數據接收(RXD_A)。本光纖網設計為同步通信方式(數據鏈路層采用HDLC協議),由主控節點提供全網工作時鐘,從節點以TRCLK為時鐘來收發數據。
2.2 EPLD邏輯功能
由圖4可知,光纖節點單元的主要功能均由EPLD的內部邏輯完成。EPLD主要包括如下邏輯功能單元:自愈控制數據選擇器U1、U2,通道編解碼單元U3、U4,通道同步狀態檢測器U5,工作模式選擇單元U6,接收數據選擇單元U7、U8,輸出數據選擇器U9~U12及控模式發送編碼器U13。其中U1與U2、U3與U4功能相同,分別處理兩個光纖環路上的數據。U5~U13為公用單元。
2.2.1 編解碼單元
編解碼單元U3、U4是本設計中的核心單元,分別負責左右兩側通道接收數據的編碼、解碼,具體功能是:
(1)從光纖接收數據流中恢復主通道、輔助通道通信數據;
(2)恢復IRIG-B時間編碼;
(3)差別網絡通信狀態(SYNC);
(4)恢復數據收發時鐘TRCLK;
(5)提供接收數據有效標志REC;
(6)將發送數據編碼到輸出數據流中。
該單元內部工作流程如下:光纖接收器件接收到的數據流首先通過數字鎖相環(DPLL)產生工作時鐘,用該時鐘驅動編解碼狀態機。該狀態機為Mealy型狀態機[5],其狀態的改變與當前狀態和光纖輸入信號NET_IN有關。該狀態機的狀態轉移圖如圖5所示。圖中,“0”和“1”為NET_IN輸入狀態,其它標注為在該步狀態轉移時所產生的附加動作。
其中S0為初始狀態,在該狀態下,必須連續接收到4個“0”,即經過狀態S1、S2、S3后才能到達S4。其間結果收到“1”則轉S0,同時將接收同步狀態標志SYNC清除,表示此時處于失步狀態。SYNC狀態是進行環網自愈控制的主要依據。S4狀態用于接收幀起始標志位“1”,如果此時輸入為“0”,則輸出SYNC無效且保持在該狀態。如果收到“1”則認為收到幀起始標志,設置SYNC為有效并轉狀態S5。S5為IRIG-B碼接收狀態,在該狀態下輸出IRIG-B碼。S5經一個狀態機時鐘無條件轉移到S6。S6為主通道數據處理狀態,在本節點處于接收狀態時(TXEN=0),輸出收數據。如果本節點處于正常數據發送狀態(TXEN=1/NET_EN=0),則將需要發送的數據插入到發送數據流中的主通道位置。S6經一個狀態機時鐘無條件轉移到S7。S7為輔助通道數據處理狀態,在本節點處于接收狀態時(TXEN=0),輸出接收數據。如果本節點處于輔助數據發送狀態(TXEN=1/NET_EN=1),則將需要發送的數據插入到發送數據流中的輔助通道位置。S7經一個狀態機時鐘無條件轉移到S8。S8之后將連續接收4位“0”,即經過S8、S1、S2、S3后開始下一幀數據接收;如果其間收到“1”,則認為幀失步,轉入初始狀態S0。
可見,該狀態機通過識別每幀后面連續4位“0”和后續的幀起始位來唯一地確定一幀的開始,并立即進入同步狀態,這種做法同步搜索速度快,但要以犧牲通道速度為代價。在要求速度較高的場合,可增加通信數據的位數,但無法做到立即同步,不過可通過收發數據間隔(發送數據位全為0)進行同步搜索。
2.2.2 自愈控制
數據選擇器U1、U2用于選擇光纖發送端的數據源,實現環網工作模式的轉換。它有三個數據輸入端,分別輸入對側數據、本側數據和主控模式下的發送數據。當從節點兩側接收都處于同步狀態時,選擇對側數據,則數據流向如圖2(a)所示。當對側數據收異常時(取決于對側的SYNC狀態),則選擇本側數據,從而實現自愈環功能,如圖2(b)及力2(c)表示。當該節點處于主控位置時,兩側數據源均由主控編碼單元U13提供。U13輸出數據格式如圖3所示。每幀以起始位開始,依次是IRIG-B標準時間位、主通道位、輔助通道位。當主控節點發送數據時,占用主通道發送數據,不發送數據時該位為“0”。本單元的工作模式由單元U6確定。當M/S設置為主節點模式時,NET_EN有效時本節點處于主控模式,否則處于非主控模式,非主控模式下的工作狀態同從械。NET_EN用于實現多主節點切換網絡控制權,同時只能有一個節點NET_EN有效,它由主節點設備上的切換邏輯控制。
2.2.3 接收數據選擇
因光纖雙環網的數據可從左右兩個方向接收到,需要在本節點對采用哪個方向的接收數據進行選擇,這個任務由接收數據選擇單元U7(主通道)、U8(輔助通道)完成。其選擇依據是:離發送源路徑最后 ,則傳輸延遲最小,最先收到。每次接收信息時,總是選擇最先到達一側的數據,但必須等兩側都傳送完畢后才能允許重新切換接收源,以防頻繁切換造成時鐘抖動及數據的重疊接收。其切換關系可通過圖6所示的狀態轉移圖表示。
圖6中,S0為左側正常接收狀態,S1為左側正常接收完畢后空閑狀態,S2為右側正常接收狀態,S3為右側接收完畢后空閑狀態。轉移條件由REC_L和REC_R的組合確定,REC_L及REC_R分別指示兩通道數據接收狀態。當處于S0及S1狀態時,選擇左側通道接收,處于S2及S3狀態時選擇右側通道接收。由S1到S0及S3到S2的轉移條件可以看出,在兩側同時接收到數據時,優先選擇上次接收到數據的那一側,這樣可以避免通道的頻繁切換。
經U7進行通道選擇后,還要經過U5與兩側通道的同步狀態共同決策,最終確定接收端采用哪一側的數據,并驅動數據選擇器U9、U10、U11、U12,分別產生最終輸出,包括主通道數據RXD,輔助通道數據RXD_A、數據收發時鐘TRCLK及IRIG-B時間編碼B_OUT。
以上論述主要是針對工作于從節點模式下的情況。在主控模式下,發送編碼由U13完成,接收情況與從節點基本相同。
2.3 硬件實現方案
光纖環網節點單元的EPLD芯片選用ALTERA公司的電源除可編程邏輯器件EPM7128[6]。它具有“在系統內編程”(In-System Programmability)功能,使用其JATG接口編程,以后功能上的升級非常方便。
光纖收發器件采用HP公司的Versatile Link系列產品,其內部電路集成化程度高,光纖環網節點模塊可做得非常小,實際為54mm×40mm,很容易嵌入到產品內部。
光纖采用1mmPOF光纖或200μmHCS光纖,其中POFD光纖通信距離可達100m,不需要特殊加工工具,現場布線及維護方便,適用于近距離通信。HCS光纖通信距離可達500m,適用于控制點分散的場合,兩種光纖使用相同的光纖收發器件,可混合使用。
2.4 軟件實現方案
上述各單元的邏輯功能均采用AHDL語言(ALTERA公司的硬件描述語言)編程實現,限于篇幅,程序清單略。
3 系統性能測試
本文所論述的光纖自愈環網已應用于煙臺東方電子信息產業股份有限公司最新開發的“DF3600而向對象的高壓變電站自動化系統”中,目前該系統成功通過了中國電科院RTU質檢部嚴格的型式試驗,即將投放現場試運行。
試驗實測數據顯示:光纖雙環網在通信速率為1Mbps時,IRIG-B信號由通道組幀造成的最大誤差為1μs,通信速率為187.5kbps時的最大誤差為6μs;數據傳輸經過每個節點引起延遲不大于0.6μs。按環網中配置50個節點計算,正常狀態下(雙環工作),總延遲不大于150μs,最壞情況(在主控點附近發生單側故障)總延遲不大于300μs,即IRIG-B時間精度主要取決于光纖環路傳輸延遲,在節點數量不多于50個時,可保證小于0.3ms,滿足220~500kV變電所計算機監控系統設計技術規定>>[3]中“整個系統對時精度應不大于0.5ms”的要求。
針對變電站自動化系統中光纖網絡存在的缺陷,本文提出并設計實現了一套光纖自愈環網系統。該系統解決了變電站自動變系統通信網絡的抗電磁干擾能力問題,滿足了通信主機雙重冗余配置、高對時精度及對突發事件快速響應等要求,且具有現場施工維護方便等優點。該光纖網絡還可通過降低通信速率的方式應用于異步通信系統中。因此,該光纖自愈環網系統在變電站自動化系統中具有廣闊的應用前景和推廣價值。






評論