低照度CCD圖像采集及噪聲預處理

摘 要: 介紹電荷耦合器件CCD,及其在低照度條件下的噪聲影響機制,并從圖像預處理的角度分析噪聲消除的可能性,最后通過現場可編程器件FPGA從硬件上實現低照度條件下CCD圖像采集的實時噪聲消除預處理。
本文引用地址:http://www.j9360.com/article/225720.htm關鍵詞: 低照度圖像 實時噪聲處理 電荷耦合器件(CCD) 可編程器件(FPGA)
八十年代后期,CCD器件進入實用階段,得到廣泛的應用。但直接用在低照度下的監測和識別時,信噪比急劇下降。在軍事和天文觀測中可采用專用的像增強器,但在普通的應用中,為降低成本一般通過計算機進行圖像處理提高信噪比。本文提供一種折衷的方案,通過分析CCD的特點,采用硬件的方法實現圖像增強,為計算機后端減少了大量復雜的運算,為整個系統的實時性創造了條件。
1 CCD 的原理
CCD 的圖像捕捉過程分為三個子過程,即:光電轉換和儲存,電荷轉移,電荷讀出。
 CCD器件是有許多光敏像元組成的,每個像元可看成是一個兩極加有反向偏壓的光敏二極管。當一個光子入射到光敏二極管的耗盡層時,如果其能量hv大于半導體的禁帶Eg,半導體的價電子將越遷到導帶形成光生電子-空穴對。由于空間電荷區對光生電子是一個低勢能的勢阱,光生電子將被收集在勢阱中,這樣就完成了一次光電轉換和儲存。
CCD器件是有許多光敏像元組成的,每個像元可看成是一個兩極加有反向偏壓的光敏二極管。當一個光子入射到光敏二極管的耗盡層時,如果其能量hv大于半導體的禁帶Eg,半導體的價電子將越遷到導帶形成光生電子-空穴對。由于空間電荷區對光生電子是一個低勢能的勢阱,光生電子將被收集在勢阱中,這樣就完成了一次光電轉換和儲存。
六十年代末,貝爾實驗室的研究人員發現,電荷通過半導體勢阱會發生轉移現象。這樣,如果把一系列的光敏二極管排列起來,通過電荷在勢阱中的轉移,就有可能在一定的時序驅動下讀出儲存在每個光敏二極管勢阱的光電信息。圖1是典型的三相CCD的電荷轉移過程。
雖然用同一組CCD光敏二極管就可以完成攝像器件的光電轉換和轉移,但是,由于復雜的控制光點極不利于提高CCD器件的量子效率。同時在CCD電荷轉移時各個光敏單元還正在進行光電轉換,這將使輸出信號產生拖影。所以,實際的CCD器件的光敏單元和轉移單元 是分開的,通過一定的時序控制可以實現光敏單元向轉移單元的整體轉移,然后再由轉移單元串行地往外部輸出。
是分開的,通過一定的時序控制可以實現光敏單元向轉移單元的整體轉移,然后再由轉移單元串行地往外部輸出。
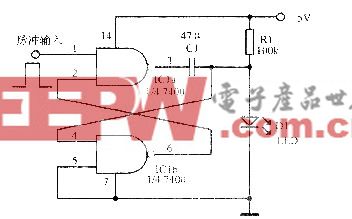
CCD的信號讀出通常采用選通電荷積分器結構,圖2是三相CCD的電荷讀出原理:其中Cs是反向偏置二極管D的結電容。當待讀出電荷到達![]() 勢阱時,T1在短脈沖的作用下快速導通使Cs充電到高電位。接著下一相時鐘到達,待讀出電荷轉移到
勢阱時,T1在短脈沖的作用下快速導通使Cs充電到高電位。接著下一相時鐘到達,待讀出電荷轉移到![]() 勢阱,待讀出電荷將對Cs充電使其電壓下降,電壓的下降幅度與待讀出電荷量成正比,最后由T2驅動輸出。
勢阱,待讀出電荷將對Cs充電使其電壓下降,電壓的下降幅度與待讀出電荷量成正比,最后由T2驅動輸出。
2 CCD 的噪聲分析
在低照度圖像實時噪聲處理采集卡研制過程中,我們所遇到的噪聲主要有以下幾種。
暗電流噪聲:復合——產生中心非均勻分布,特別是某些單元位置上缺陷密集形成暗電流峰。由于信號的讀出路徑各異,這些暗電流峰對各個電荷包的電荷貢獻也不等,因而形成背景的很大起伏。另外,耗盡層熱激發(符合泊松分布)對背景起伏也有貢獻。
因暗電流大小與位置基本固定,故可用電子學方法消除。但當器件工作在長時間積分的弱信號觀測時,暗電流的影響將是主要因素。在這種情況下,器件應工作于人工制冷狀態(在液氮溫度下,暗電流可比常溫下減小三個數量級)。
 光響應非均勻性:當CCD的各個像元在均勻光源照射下,CCD器件具有光響應非均勻性(PRNU)它主要與器件的制造工藝有關,由于近紅外光在硅中的穿透能力較強,PRNU還受襯底材料的非均勻性影響。PRNU沒有一定的規律,因器件而異,具有很大隨機性。因此,對于弱信號的應用,應進行實際測量,然后加以補償以達到均勻響應。
光響應非均勻性:當CCD的各個像元在均勻光源照射下,CCD器件具有光響應非均勻性(PRNU)它主要與器件的制造工藝有關,由于近紅外光在硅中的穿透能力較強,PRNU還受襯底材料的非均勻性影響。PRNU沒有一定的規律,因器件而異,具有很大隨機性。因此,對于弱信號的應用,應進行實際測量,然后加以補償以達到均勻響應。
散粒噪聲:光注入光敏區產生信號電荷的過程可看作隨機過程,單位時間產生的光生電荷數目在平均值上做微小波動,即形成散粒噪聲。散粒噪聲與頻率無關,在所有頻率范圍內有均勻的功率分布(白噪聲特性)。散粒噪聲在低照度,低反差條件應用時,當其它噪聲用各種方法抑制后,散粒噪聲成為主要噪聲,決定了一個器件的極限噪聲水平。
雜波噪聲:主要來源于傳輸通道及各種器件,多為無規則隨機信號,頻譜較寬,幅度不等。圖像信號相鄰像素、相鄰行、相鄰幀具有較大相關性,而雜波噪聲具有隨機性,據此可設計出積分平均器以改善雜波噪聲。
實驗表明相鄰像素或相鄰行的積分平均器效果并不理想,因為它較大地影響了水平和垂直分辨率,相鄰幀積分平均器對圖像分辨率影響不大,特別對靜態圖像它具有極佳的雜波抑制效果。在實現時一般還需對K值自適應控制(幀間內容變化較大時自動減小K值,反之增大),以取得更好的效果。積分平均器的數字電路實現原理及性能見圖3。
3 CCD 實時噪聲處理的硬件設計
對低照度條件下所遇到的主要噪聲特點分析,除了散粒噪聲決定了最終噪聲水平,必須通過降低工作溫度以提高信噪比外,其它噪聲可以通過適當的算法加以改善。在實現時我們設計的處理流程如下:控制CCD短時間拍攝一幀圖像,減去事先測量獲得的暗電流圖像,然后根據事先測量的光響應非均勻性進行修正,最后通過幀積分平均器消除散粒噪聲和雜波噪聲的影響。
在實現時,我們采用了具有很高邏輯密度和性價比的EPF10K30嵌入所有的算法和控制邏輯,加上高速SRAM 和高速A/D變換器構成了整個系統。其中SRAM分為三個可獨立的部分:存儲背景存儲器、PRNU參數存儲器和幀存儲器。當A/D完成一次轉換時,控制邏輯同時從三個存儲器獲得數據,通過處理后寫回幀存儲器,由于三個存儲器可同時訪問,因此極大地提高了系統的并行處理效率。系統結構框圖如圖4。
實驗表明,肉眼很難辨別的低照度圖像通過這種方法處理后能夠實時得到易于辨別的圖像,并能被后續的模式識別程序很好地識別。

半導體制冷相關文章:半導體制冷原理
電荷放大器相關文章:電荷放大器原理





評論