基于MSP430的倒車雷達的設計

隨著人們對汽車輔助駕駛系統智能化要求的提高和汽車電子系統的網絡化發展,新型的倒車雷達應能夠連續測距并顯示障礙物距離,并具有通信功能,能夠把數據發送到汽車總線上去。
系統總體設計
系統采用超聲波測距原理。超聲波測距儀器一般由發射器、接收器和信號處理器三部分組成。工作時,超聲波發射器發出超聲波脈沖,超聲波接收器接收遇到障礙物反射回來的反射波,準確測量超聲波從發射到遇到障礙物反射返回的時間,根據超聲波的傳播速度,可以計算出障礙物距離。作為一種非接觸式的檢測方式,超聲波具有空氣傳播衰減小、反射能力和穿透性強的特點。超聲波測距具有在近距離范圍內有不受光線和雨雪霧的影響、結構簡單、制作方便和成本低等優點。高性能的單片機結合超聲波測距,可以實現功能強大、使用方便的倒車雷達。TI公司的16位單片機MSP430F2274功耗極低,片上資源豐富,同時利用JTAG接口技術,可以對片上閃存方便的編程,便于軟件的升級,非常適合作為倒車雷達系統的微控制器。倒車雷達系統的框圖如圖1所示。

圖1 倒車雷達系統框圖
硬件系統設計
系統以MSP430F2274微控制器為核心,外圍電路由超聲波發射電路、超聲波接收電路、聲光報警電路、通信接口電路、鍵盤液晶顯示電路五部分組成,下面逐一介紹。
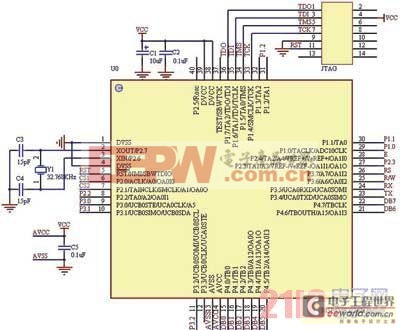
圖2 倒車雷達系統主控電路圖
系統的主控電路圖如圖2所示。本系統中選用的MSP430F2274片內有32Kb閃存和1Kb RAM,因此無須外擴存儲器。外接的32.768kHz晶振作為CPU關閉狀態Basic-Timer的時鐘源,同時也作為系統的車載時鐘使用。

相關推薦
-
★被水淹死的魚★ | 2003-02-12
-

-
-

-
-

-

-

-

-
-
-
-
wsf999 | 2004-08-06
-
-

-

-
zhao_blues | 2005-03-14
-
-
-

-
-
-
-
Naiqa | 2002-11-13
-
jackwang | 2002-05-14
評論