基于ARM的自主式移動機器人設計

LPC2119是Philips公司推出的支持實時仿真和跟蹤的ARM7TDMI-S微處理器,嵌入128KB高速Flash存儲器。它采用3級流水線技術,取指、譯碼和執行同時進行,能夠并行處理指令,提高CPU運行速度。由于其具有非常小的尺寸和極低的功耗,非常適合小型化應用。片內多達64KB的SRAM,具有較大的緩沖區規模和強大的處理能力。LPC2119內部集成2個CAN控制器、2個32位定時計數器和4個ADC單元電路。
1 硬件結構
控制器LPC2119主要用來產生2路PWM信號以及處理傳感器信息,實現對小車的智能控制。本系統采用IR2110作為H橋電路驅動芯片,用4片STP60NE06搭接H橋電路驅動直流電機,并利用光電編碼器檢測電機轉速;采用16路超聲傳感器系統作為系統的避碰和簡單測距;采用光敏傳感器實現機器人對光源的感知和尋找;采用碰撞傳感器感知碰撞,使機器人能做出急時處理;采用無線通信芯片PTR2000實現機器人與計算機的無線通信。
1.1 電機的PWM控制
IR2110是美國IR(International Rectifier)公司推出的一種雙通道、高壓、高速的功率器件柵極驅動的單片式集成驅動器。它把驅動高壓側和低壓側MOSFET或IGBT所需的絕大部分功能集成在一個高性能的封裝內,外接很少的分立元件即能提供極快的開關速度和極低的功耗。其特點在于:將輸入邏輯信號轉換成同相位低阻抗輸出驅動信號,可驅動同一橋臂上的2路輸出,驅動能力強,響應速度快;工作電壓較高,可達600V;內設欠壓封鎖;成本低、易于調試;電路芯片體積小,為DIP14封裝。高壓側驅動采用外部自舉電容上電,與其他IC驅動電路相比,在設計上大大減少了驅動變壓器和電容的數目,降低了產品成本,減小了體積,提高了系統的可靠性。這種適用于驅動功率MOSFET和IGBT的自舉式集成電路,在電源變換、電機調速等功率驅動領域中獲得了廣泛的應用。
LPC2119單片機的PWM功能建立在標準定時器上,它具有32位的定時控制器及預分頻控制器、7個匹配控制器,可實現6個單邊PWM或3個雙邊PWM輸出,也可以使用這兩種類型的混合輸出。此系統使用端口PWM0和PWM1輸出兩路PWM信號,分別控制移動機器人的2個驅動電機。PWM信號經過光電耦合器形成兩路相位相差180°的信號加到IR2110的HIN和LIN引腳上,實現對同一橋臂上的兩個MOSFET開關的控制,原理如圖1所示。
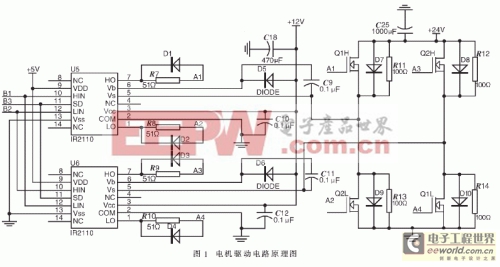
HIN為高電平期間,Q1、Q4導通,在直流電機上加正向工作電壓;HIN為低電平期間,LIN端輸入高電平,Q2、Q3導通,在直流電機上加反向工作電壓。因此電樞上的工作電壓是雙極性矩形脈沖波形。由于機械慣性的作用,矩形脈沖電壓的平均值決定電動機的轉向和轉速。

pwm相關文章:pwm是什么








評論