一種數控高穩定性直流大電流信號源系統

0 引言
在測試測量、計量校準領域中,大電流源是不可或缺的儀器,在科研國防及新能源領域中應用廣泛。目前,多數電流源普遍采用壓控方式,首先需要產生控制電壓,然后經電壓- 電流轉換實現電流輸出。由于控制電壓產生方式、質量,以及電壓- 電流轉換電路的實現方式的不同,電流源在輸出范圍和輸出精度上有較大差異。在測試系統、校準設備等應用環境中,電流輸出多直接采用電流輸出型D/A 轉換器產生,這種方式雖然精度可以達到μA 級別,但由于D/A 轉換器的輸出電流范圍較小,所以這類電流源的輸出不會超過幾mA,很難保證校準設備測試環節中動輒幾百到幾千A 的需求。針對上述問題,設計實現了一種數控高穩定性大電流源系統,系統以20 位DAC 產生高精度控制電壓信號,采用模擬電路實現電壓- 電流轉換,采用磁通門傳感器、低溫漂電阻及24 位ADC 對輸出進行采樣,利用一整套系統進行閉環控制,確保輸出高精度和高穩定性。
1 原理
1.1 MOS管控制電流原理
MOS 管是電壓控制器件,需要使用電壓控制G 角來實現對管子電流的控制。最常見的是增強型N 溝通MOS 管,使用一個電壓來控制G 的電壓,導通電壓一般在(2 ~ 4)V,若要完全控制,這個值一般要上升到10 V 左右。
以N 溝道MOS 管為例,Vt 是其導通的閾值電壓,當 時,源極漏極之間隔著P 區,漏結反偏,故無漏極電流,MOS 管不導通;當
時,源極漏極之間隔著P 區,漏結反偏,故無漏極電流,MOS 管不導通;當 時柵極下的p型硅表面發生強反型,形成連通源區和漏區的N 型溝道產生漏極電流ID,MOS 管導通。
時柵極下的p型硅表面發生強反型,形成連通源區和漏區的N 型溝道產生漏極電流ID,MOS 管導通。
對于恒定Vds,Vgs 越大,則溝道中可移動的電子越多,溝道電阻就越小,ID 就越大,當然這個Vgs 大到一定值,電壓再大,ID 也不會再有太大的變化了。MOS 管的漏、源、柵極都有寄生電容,分別是Cds、Cgd 和Cgs,如圖1 所示。

圖1 MOS管的寄生電容
其中
Cds = Coss(輸出電容);
Cgd + Cgs = Ciss(輸入電容);

圖2 MOS管開關過程中柵極電荷特性
圖2中,VTH 為開關閾值電壓;VGP 為米勒平臺電壓;VCC 為驅動電路的電源電壓;VDD 為MOS 關斷時D 和S極施加的電壓。
T1 階段:當驅動開通脈沖加到MOS 管的G 極和S極時,輸入電容Ciss 充電直到MOS 管開啟為止,開啟時有Vgs = Vth,柵極電壓達到Vth 前,MOS 管一直處于關斷狀態,只有很小的電流流過MOS 管,Vds 的電壓Vdd 保持不變。
T2 階段:當Vgs 到達Vth 時,漏極開始流過電流ID,然后Vgs 繼續上升,ID 也逐漸上升,Vds 保持VDD 不變,當Vds 到達米勒平臺電壓Vgp 時,ID 也上升到負載電流最大值ID,VDS 的電壓開始從VDD 下降。
T3 階段:米勒平臺器件,ID 繼續保持ID 不變,VDS電壓不斷降低,米勒平臺技術時刻,ID 電流仍維持,VDS 電壓降到一個較低的值。米勒平臺的高度受負載電流的影響,負載電流越大,則ID 到達此電流的時間就越長,從而導致更高的VGP。
T4 階段:米勒平臺結束后,ID 電流仍維持,VGS 電壓繼續降低,但此時降低的斜率很小,因此降低的幅度也很小,最后穩定在VDS = ID × Rds,因此通常可以認為米勒平臺結束后MOS 管基本上已經導通,為了減少開通損耗,一般要盡可能減少米勒平臺的時間。
2 設計
2.1 總體方案設計
電流源的系統框圖如圖3 所示,整個系統分為輸出部分和回采調整部分。

圖3 系統總體框圖
輸出部分負責控制電壓的產生,經過調理電路,控制大功率MOS 管,進而控制流經MOS 管的電流。回采部分主要實現輸出電流信號的采樣,大電流信號經過磁通門傳感器轉換為小電流信號,再經過采樣電阻轉換為電壓信號,計入模數轉換器采集,經過數據處理,再控制輸出部分,調整輸出信號,達到動態調整輸出、輸出保持高穩定的目的。
2.2 硬件電路設計
2.2.1 電壓基準模塊
無論是模數轉換器或數模轉換器,想要實現高性能,都需要一個高穩定性的基準電壓。LM399 保證5×10-7/℃的極低溫漂系數,同時具有20 μVRMS 最大噪聲,滿足系統對基準的要求,其硬件電路圖如圖4 所示。

圖4 電壓基準模塊
LM399 為固定6.95 V 并聯基準,不在AD5791 和CS5532 所容許的基準電壓范圍內,需要配合低溫漂電阻和儀用放大器AD8675 調節電壓,以達到模數轉換器和數模轉換器基準范圍。
2.2.2 數模轉換器模塊
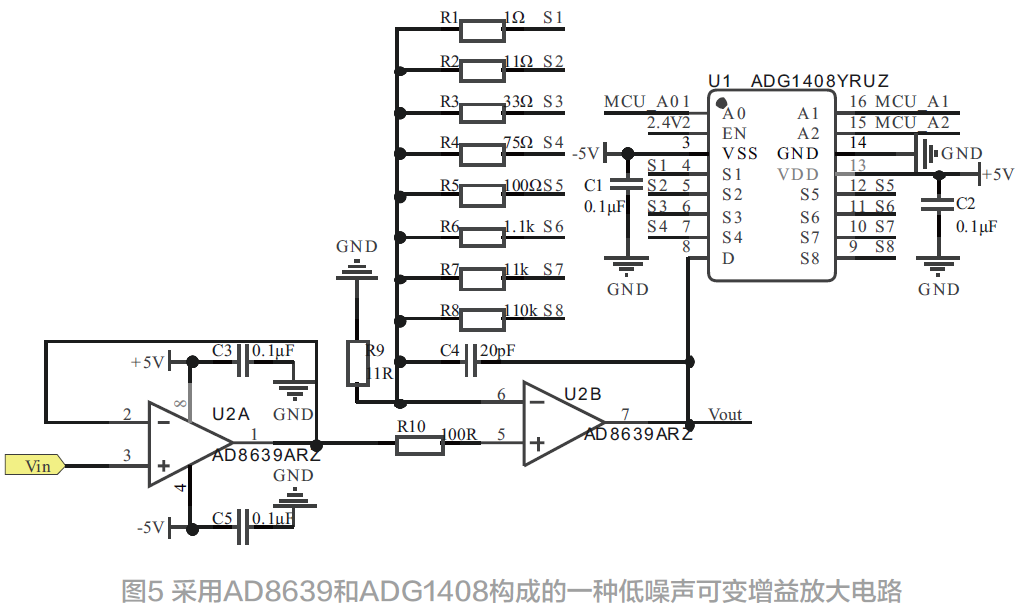
數模轉換器(DAC)的精度決定了輸出系統的精度和調節能力,本文選擇ADI 的AD5791 作為DAC,該DAC 具有20 bit 分辨率,1 μs 建立時間,滿足大部分科研項目要求,且支持雙極性輸出,應用更加廣泛,其硬件電路如圖5 所示。

圖5 數模轉換器電路
AD5791 是一款高精度、快速建立、單通道電壓輸出DAC,分辨率可達10-6,此類DAC 對基準和電源要求較高,內部無緩沖,所以在硬件設計中加入了外部緩沖電路,保證電壓控制型號的穩定和精準。
2.2.3 誤差放大電路
電流源在輸出時,輸出信號會隨著環境的變化產生波動,為了保持輸出的穩定,就需要設計電路在輸出信號波動的時候可以自動調整控制型號,保證輸出的穩定性。本設計使用誤差放大電路解決這個問題,硬件設計如圖6 所示。

圖6 誤差放大電路
解決波動可以使用數字或模擬兩種方式解決,數字電路反應速度嚴重依賴于硬件處理速度,且電路復雜,模擬電路反應迅速且電路簡單,對于本系統環境,使用模擬電路解決更為適合。
誤差放大電路的作用是通過比較取樣電壓,亦稱反饋電壓與基準電壓之間的誤差值來產生誤差電壓,進而調節晶體管的壓降,使輸出電壓維持不變,在基準電壓穩定的前提下,誤差放大器是影響線性穩壓器性能的關鍵因素。
差分輸入式放大器的簡化電路如圖7所示。

圖7 誤差放大器簡圖
當電源電壓UCC和芯片溫度保持恒定時,由誤差放大器輸出的誤差電壓為:

式中:AVO為放大器的開環增益;β 為反饋系數, 由上式解出:
由上式解出:
當AVO接近于無窮大時:
在UREF和AVO保持不變的情況下,誤差電壓Ur 的溫漂通常為±(5.0 ~ 15)μV/℃,這會導致Ur 成比例的變化,解決方法是使誤差放大器的輸入晶體盡可能匹配,并使反饋系數β = 1,此外,當電源電壓UCC變化時,Ur 也隨之改變,利用AVO、電源抑制比(PSRR)和共模抑制比(CMRR)都很高的放大器能減少這種影響。AD8675 具有極低電壓噪聲、軌到軌輸出擺幅和低輸入偏置電流的優點,且電源抑制比和共模抑制比都可以達到130 dB 以上,符合系統設計要求。
2.2.4 數據采集模塊
數據采集模塊實現了輸出信號的采樣功能,是保證系統性能主要的模塊,其硬件設計電路如圖8 所示。

圖8 信號調理電路

圖9 模數轉換電路
模數轉換器采用CS5532,它采用電荷平衡技術,有24 位性能,對科研醫療應用中測量低電平單極或雙極信號進行了優化,同時包含超低噪、斬波穩定式測量放大器、數字濾波器和四階Delta Sigma 調制器,具有出色的性能和穩定性,足以應對本系統設計要求。
CS5532 的基準電壓同樣由LM399 經運放調理得出,與AD5791 使用同一基準源,統一基準性能的同時,這種設計方式可以在系統遇到異常情況時輸出控制和輸入采樣所遭遇的偏差一致,增強系統的穩定性。
2.3 軟件控制部分
數字控制器采用意法半導體的高性能MCU STM32F407VE,該MCU 具有高達168 MHz 的主頻和192 kB內部RAM 空間,包含3 個硬件SPI 模塊,用于與模數轉換器和數模轉換器的通信和控制,同時該MCU 支持DSP 指令,使數據處理的性能大大增加,系統反饋速度更快、更及時。
軟件控制部分設計框圖如圖10 所示。

圖10 軟件設計框圖
系統上電開始,軟件首先進行硬件的初始化工作,并配置系統硬件到安全狀態,配置完成后,啟動用戶界面,等待用戶操作。系統在輸出狀態會先輸出一個接近設定值的初始輸出值,由于輸出的是電流信號,實際輸出信號會隨著負載的變化而變化,軟件不斷通過數據采集系統回讀輸出值,這些數據經過計算得出調節值。計算選擇PID 算法,PID 算法是動態控制過程比較常用的算法,經過調教,算法能夠在動態過程中快速、平穩、準確地得到良好的效果。使用算法得出的調節值能夠再控制信號輸出系統調整輸出信號,保證輸出信號的穩定性和高精度。
2.4 電流源高精度的實現
2.4.1 控制電壓
控制電壓由AD5791 經過外部緩沖電路輸出初始信號,基于AD5791 和LM399 基準電壓的性能保證信號的穩定性,LM399 基準電壓經過AD8675 運放搭建的調節電路輸出10 V 基準電壓,AD5791 可輸出(0 ~ 10)V的控制電壓。AD5791 的零點誤差可以通過數字輸入補償,不會引起輸出誤差。
誤差放大電路由AD8675 儀用放大器搭建,該運放噪聲極低,偏置很小,并可通過AD5791 補償部分中和,這部分誤差不會影響系統指標。
2.4.2 輸出采樣系統
系統輸出電流信號高達300 A,無法直接使用采樣電阻采樣,本文使用磁通門傳感器技術將輸出信號進行1:1 000 變比,轉化為小電流信號,磁通門傳感器相較于霍爾傳感器,精度更高、抗干擾能力更強的優點,系統采用的磁通門傳感器精度可達10-6/℃。
采樣電阻是采樣電路重要的一環,本文采用Vishay公司的VPR221t 系列電阻作為采樣電阻,電阻具有2×10-6/℃溫漂,且工作溫度范圍為(-55 ~ 150)℃,具有極高的穩定性。
當電流信號經過采樣電阻轉化為電壓信號之后,進入調理電路,調理到合適的電壓范圍,即可使用模數轉換器進行數據采集。CS5532 具有24 bit 分辨率,采樣誤差在10-6 內,保證系統性能。
3 實驗結果
使用FLUKE 公司的8 位半數字表8508A 和精度為10-6 的電流傳感器對系統性能進行測試,測試結果如圖11 所示。

圖11 測試結果
通過實驗驗證,高穩定性大電流信號源系統在較大的輸出范圍下能保證高精度和高穩定性,可以為工作人員設計系統、測試電路提供更多便利,目前已應用在計量校準工作中。
參考文獻:
[1] 王少軍,彭喜元,劉大同.一種高精度直流電流源設計[C].2009中國儀器儀表與測控技術大會論文集, 哈爾濱,2009-7-23.
[2] 馬薇,陳立偉,袁靜.直流電流源的特性分析與電路設計[J].長春工程學院學報(自然科學版),2016(2):29-33.
[3] TIAN X.Research and implementation of 100 A pulsed current source pulse edge compression[J].中國郵電高校學報(英文版),2016(2):73-78.
[4] 楊韜悅,張士科,楊新華.一種大電流高精度電流源設計[J].電子設計工程,2017(22):158-161.
[5] 張丹,李東勝.電壓源和電流源在等效變換中的合理匹配分析[J].微型電腦應用,2013(10):15-17.
(本文來源于《電子產品世界》雜志社2021年11月期)







評論