小型智慧太陽能路燈控制系統設計與策略研究

蘇宏鋒,張?強,唐國強(四川交通職業技術學院,成都?611130)
本文引用地址:http://www.j9360.com/article/201908/404231.htm摘?要:針對傳統太陽能路燈存在功能單一、太陽能利用率低與照明燈光控制不合理的問題,設計了一種小型智慧太陽能路燈控制系統。試驗結果表明,該系統能夠自適應跟蹤太陽位置,使太陽能帆板獲取最大光照強度,并能顯示蓄電池電量存儲信息。為更加合理使用電能,構建了一種基于太陽能路燈點亮優先、自適應調整燈光亮度與點亮時長的模糊控制策略。
*基金項目:四川交通職業技術學院院級項目(2018-JG-06);2018年四川省“互聯網+”大學生創新創業大賽銅獎項目。
0 引言
根據國家住房與城鄉建設部規劃,“十三五”期間國家對智慧城市的投資總規模將逾5 000億元 [1] ,以低碳、綠色、節能、環保為核心的城市智慧照明憑借智能控制、個性化與應用前景廣泛等優勢逐步取代傳統照明,成為城市照明行業新的增長點。當前城市道路路燈在夜晚處于常亮或錯時關閉狀態,太陽能路燈存在功能單一,蓄電池供電輸出沒有考慮道路人流量、車流量和蓄電池剩余量等問題。太陽能帆板由于太陽光線位置 [2]的變動或障礙物遮擋,無法獲得足夠光照,蓄電池電能使用不合理。文獻[3]針對光照強度和環境溫度的影響引起光伏系統輸出功率不穩定問題,提出一種基于神經網絡反推控制在光伏系統最大功率點跟蹤應用技術,使太陽能電池輸出功率最大化,該方法在連續陰雨天氣情況下光伏系統如何高效供電問題沒有做深入研究。文獻[4]分析研究了一種不均勻光照條件下太陽能電池串聯電路特性,提出全局動態功率點動態區間,該方法考慮了天氣變化因素對發光伏系統輸出功率的影響,但蓄電池功率輸出未考慮道路的車流量與人流量的變化。文獻[5]設計了一種雙軸太陽跟蹤控制系統,使太陽能聚光器受光面始終垂直于太陽入射光線,提高太陽能利用率,但在如何節能供電方面沒有做進一步研究。太陽能路燈發電量取決于天氣狀況,當出現連續陰雨天氣時,蓄電池儲存的電量被迅速消耗,路燈的亮燈率大大降低。因此,本文研究一種小型智慧太陽能路燈控制系統及控制策略,實現太陽能路燈節能供電。
1 系統總體設計
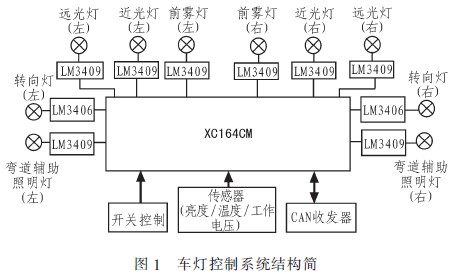
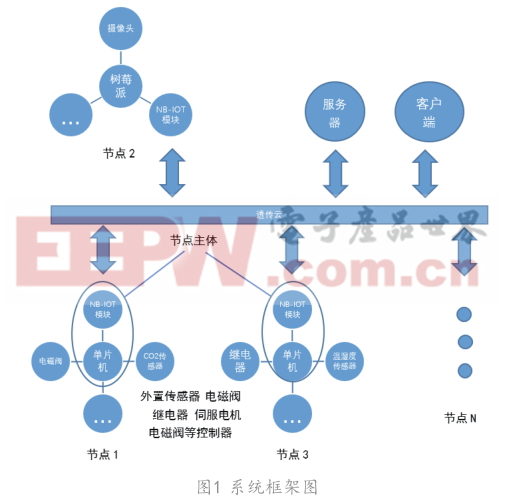
小型智慧太陽能路燈控制系統架構如圖1所示,本系統選用STC15單片機作為核心控制器,由光照檢測傳感器、步進電機、電源電路、信號預處理電路、LCD1602顯示模塊等部分組成。通過光電跟蹤模塊自動跟蹤太陽,使太陽能帆板獲得最大光照。將氣象中心檢測的氣溫、濕度、云量、風度構建太陽能發電量預測模型預測未來一周太陽能發電量,以及道路人流量和車流量、蓄電池剩余電量等作為模糊控制器的輸入,獲取太陽能模糊控制策略 [6] ,自適應調節燈光亮度、點亮時長、實現節能供電。系統還能通過故障傳感器,將故障自動分類與自診斷功能,并及時向路燈管理中心傳輸故障信息。

2 系統硬件設計
系 統 采 用 宏 晶 科 技 的STC15F2K60S2處理器為主控平臺,將光敏傳感器采集的光信號進行AD轉化,判斷當前太陽光線與太陽能帆板位置關系,從而控制步進電機轉動方向,使太陽能帆板最大化吸收太陽光線照射,LCD1602實時顯示充電時間以及充電電量百分比。
STC15F2K60S2是一款STC增強型51單片機,有2 kB容量SRAM,60 kB片內Flash(閃存),內部集成8通道10位AD轉換器 [7] ,雙串行口,ISP(在系統可編程)/IAP(在內部集成RC振蕩器,無需外接晶振和外部復位電路,大大減少了PCB板尺寸,指令處理速度是傳統STC89C51單片機的8~12倍。STC15F2K60S2單片機具有豐富的I/O端口、定時器和2路PWM通道資源,非常適合測控系統。
2.1太陽光線采集電路
將長方形太陽能帆板的東西南北4個方向上安裝型號為5506光敏電阻,對采集的光線信號值進行AD轉化,判斷當前太陽與太陽能板位置關系。太陽光線采集電路如圖2所示,由于AD轉換后得到的是電壓信號,需通過一個固定電阻與光敏電阻分壓。當光照變化時,光敏電阻R1~R4電阻值發生改變,根據串聯分壓的原理,此時通過AD轉換獲取光敏電阻上的電壓值及光照強度。設計了C8~C11等4個濾波電容,目的是使AD轉換后的信號更加的精準。
2.2 太陽能轉換穩壓電路

由于太陽能板轉換后的電壓信號紋波較大,設計了如圖3所示的太陽能轉換穩壓電路。采用美國德州儀器(TI公司)和摩托羅拉公司(注:現在為恩智浦半導體公司)生產的2.5V~36V可調式精密并聯穩壓器TL431來設計太陽能轉換穩壓電路。TL431的內部含有一個2.5V的基準電壓V REF [8] ,當在REF端引入輸出反饋時,器件通過從內部二極管的陰極到陽極寬范圍的分流,控制輸出電壓Vout的計算公式:

太陽能轉換穩壓電路中的R12和R13對輸出電壓V out 的分壓引入負反饋,反饋量逐漸增大隨著V out 不斷增大,TL431的分流也隨著增加,導致輸出電壓V out 下降。深度負反饋電路要求輸入電壓V in 等于基準電壓V REF時才保持穩定。當R12與R13阻值相同時,輸出電壓V out等于5 V。選擇電阻時必須保證通過TL431陰極的電流大于1 mA,故R11阻值取20 Ω,C6為后級濾波電容,減少輸出電壓信號的紋波。

2.3 步進電機驅動電路
根據光敏電阻隨太陽光線強度改變的特性,采用STC15F2K60S2單片機片內置10位高速AD轉換的信號來判斷當前太陽所在位置,控制步進電機轉動使太陽能板最大化的吸收太陽光。為了使太陽能帆板在0~180°范圍能都能獲取光照,在“水平+垂直”2個方位分別安裝型號為28BYJ-48的步進電機,工作電壓為5~12 V,工作電流約為60 mA,ULN2803是8路NPN達林頓連接晶體管陣系列,能驅動電流高達500mA、電壓50 V的負載,可用于步進電機的驅動。圖4為步進電機驅動電路,P4和P5是用于太陽能帆板水平方向與垂直方向轉動控制的5線4相步進電機連接接口,ULN2803由于要同時驅動兩個步進電機,所以采用12V電壓供電。

2.4 燈光控制策略
將氣象中心檢測的氣溫、濕度、云量、風度構建太陽能發電量預測模型獲取太陽能發電量,將預測的發電量、道路人流量、車流量以及蓄電池剩余電量等參數作為模糊控制器的輸入,構建基于太陽能路燈點亮優先、自適應調整燈光亮度與點亮時長的模糊控制策略。燈光模糊控制策略如圖5所示。

根據傳感器采集的人流量、車流量、環境能見度、蓄電池剩余電量等信息構建模糊控制策略,生成不同等級燈光控制指令,實現燈光不同亮度調節、點亮時長與通斷控制,燈光控制模塊電路如圖6所示。

3 系統軟件設計
太陽能帆板上東、西、南、北方向分別安裝一個光敏傳感器采集太陽光線,通過A/D轉換獲取太陽光線的電壓信號,判斷太陽能帆板與太陽照射 光線的位置關系,控制水平方向與垂直方向步進電機的轉向,使太陽能帆板與太陽光線保持垂直。主程序流程如圖7所示。

4 系統測試
4.1 尋光功能測試
為驗證系統是否能自動跟蹤太陽位置,使太陽能帆板保持與太陽照射光線垂直,對太陽能帆板東、西、南、北四個方向進行尋光測試驗。當正東方向光敏電阻檢測到太陽光照射時,水平方向電機向東轉動,直到光敏電阻東西方向電壓相等時(即太陽90°照射太陽能板)停止轉動;當正西方向有太陽光時,水平方向電機向西轉動,直到光敏電阻東西方向電壓相等時停止轉動,其它方向亦然。試驗結果如表1所示,該系統尋光功能正常。

4.2 電量測試
當太陽能板給12 V鋰電池進行充電時,為了更直觀的獲取充電量信息,將鋰電池插入百分比電量顯示接口,顯示其電量值。通過測試驗證,太陽照射到帆板方角度與12 V 3 800 mA鋰電池的充電量百分比關系如表2所示,當太陽照射方向與太陽能板呈90°時,太陽能板獲取最強光照,蓄電池充電速率處于最大化狀態。

5 結束語
本文以STC15F2K60S2處理器為主控平臺,結合傳感器模塊與電機伺服系統,設計了一種小型智慧太陽能路燈控制系統。該系統實現了太陽能帆板上光線采集,完成太陽照射光線與太陽能帆板位置關系檢測,控制兩軸步進電機轉動使太陽能帆板獲取最大光照,試驗驗證了鋰電池的充電量與太陽照射到太陽能帆板角度關系。為達到節能供電的目的,本文提出了一種太陽能路燈點亮優先、自適應調整燈光亮度與點亮時長的模糊控制策略。
參考文獻
[1] 鐘齊鳴.“十三五”智慧城市投資總規模將逾5000億元[EB/OL].(2015-12-19).http://money.163.com/15/1219/06/BB68JC3R00252G50.html.
[2] 趙寒濤,吳文凱.折疊式太陽能自動追蹤光伏發電裝置設計[J].自動化技術與應用,2018(9):136-139.
[3] 陽同光,桂衛華.神經網絡反推控制在光伏系統最大功率點跟蹤中的應用[J].太陽能學報,2016(12):3030-3036.
[4] 樂全明,趙健,郭力.不均勻光照條件下太陽能電池串聯電路特性分析及GMPPT控制[J].光子學報,2017(6):06041001-06041012.
[5] 趙建華,張婷婷.太陽跟蹤控制系統的研究與設計[J].電子測量技術,2016(3):1-3.
[6] 徐鋒,徐鈺.基于電流預測的太陽能MPPT的模糊控制[J].電源技術,2016(6):1059-1062.
[7] 胡鄧華,馮剛,等.基于STC單片機的數字采控電路設計[J].現代電子技術,2018(8):53-56.
[8] 雷三元.基于TL431構成的自激式Buck變換器的分析與測試[J].電子技術,2017(3):1-5.
作者簡介:
蘇宏鋒(1984—),男,碩士,講師,研究方向:智能交通控制技術、電子測控技術。
本文來源于科技期刊《電子產品世界》2019年第9期第69頁,歡迎您寫論文時引用,并注明出處。



評論