STM32上SVPWM輸出的實現方案

摘要:在STM32F103VET6上實現了SVPWM輸出。介紹了SVPWM的優點及原理。結合STM32F103VET6上的硬件資源,給出了SVPWM在高級定時器上實現的方式和三相橋式驅動電路的設計。分析了該方案所占用的CPU資源。實驗結果表明,該設計方案可行,能夠實現SVPWM輸出。
關鍵詞:SVPWM;STM32;定時器;三相橋式驅動
引言
SVPWM與SPWM相比,是一種比較新穎的控制方法,能夠使輸出電流波形盡可能接近于理想的正弦波形,使直流母線電壓的利用率有了很大提高。SVPWM主要應用在變頻器領域,控制過程中需要對坐標進行變換及計算輸出時間,所以整個過程有一定的計算量,使得51單片機力不從心。人們只能采用價格昂貴、內部資源偏少的DSP作為控制芯片。隨著STM32系列芯片的出現,其豐富的片內資源、較高的處理能力、極低的價格,使其得到開發人員的青睞。
1 SVPWM原理
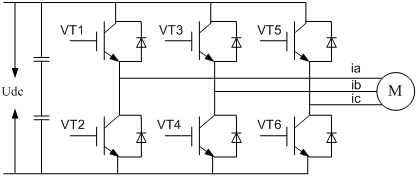
在傳統的三相橋式驅動電路中,MOS管的開關狀態一共有8種組合。如果將這幾種開關方式加到三個相差120°的繞組上,則會產生8個電壓矢量。這8個電壓矢量被稱為基本空間電壓矢量,如圖1所示。為了能夠得到一個圓形旋轉磁場,SVPWM可以通過控制8個基本空間電壓矢量的作用時間,來合成每個扇區內的任意電壓矢量。

2 系統設計方案
2.1 控制芯片
采用STMicroelectronics公司的STM32F103VET6作為其控制芯片,其內核為ARM公司Cortex—M3,最高時鐘頻率可達72 MHz,包括512K片內FLASH、64K片內RAM、ADC、SPI、CAN、FSMC等豐富的內部資源。STM32F103VET6內部包含8個定時器,其中有2個高級定時器,所有的定時器都包含一個16位自動裝載寄存器。高級定時器支持嵌入死區時間的互補PWM,而且支持剎車信號的輸入,所以非常適合應用在變頻器、電機控制器等場合。
2.2 定時器工作模式
根據SVPWM的快速算法可以得到各個基本空間電壓矢量的作用時間和輸出順序。知道輸出順序后,就可以確定高級定時器的工作模式。由于SVPWM的輸出波形是很對稱的,所以選用TIM1的中央對齊模式:
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_CenterAlignedl;
此模式下,計數器從0開始計數到自動加載值減1,同時產生一個計數器溢出事件。然后向下計數到1,并且產生一個計數器下溢事件,再從0開始重新計數。
2.3 定時器計數周期
為了提高定時器的分辨率,直接將72 MHz作為定時器的計數時鐘,沒有任何預分頻。假設SVPWM的調制頻率為frq,則可以計算時間基的計數值tpwm:
TIM_CLOCK是定時器的計數頻率,本系統為72 MHz。如果調制頻率設為20 kHz,則計數器的值則為3 600。
2.4 波形輸出
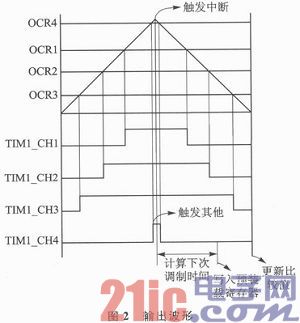
TIM1的CH1、CH1N、CH2、CH2N、CH3、CH3N通道對應的GPIO引腳須設為GPIO_Mode_AF_PP模式才能正常輸出。根據各個基本空間電壓矢量的作用時間,可以計算出TIM1上三個通道各自的OCRx值。圖2為各個通道OCRx的值對應的輸出波形。
2.5 中斷子程序
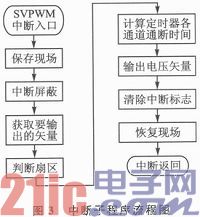
為了減少中斷的時間,在中斷程序中僅保留了輸出SVPWM所必要的運算及對TIM1必要的操作。整個程序中的所有的電壓量全部轉化為標幺值。由于STM32是一款32位的控制器,所以需要參與計算值都采用Q15的形式,這樣可以在提高精度的同時保證乘法運算不會溢出。中斷子程序的流程如圖3所示。
2.6 CPU資源占用分析
由圖2可以看出,在定時器輸出波形時有兩個觸發產生。TIM1_CH4可以用來觸發芯片的其他功能(如ADC采樣),這樣就可以自動完成一些工作,避免消耗CPU資源。
為了在一個周期調制完成后馬上進行下一個周期的調制,下次調制的時間需要提前計算,此時就必須打開定時器的預裝載功能。在發生計數器溢出中斷后,計算下一次調制時各個通道的時間。計算完成后將結果寫入預裝載寄存器,以便在下次更新時寫入新的比較值。可以看出,SVPWM只在中斷中耗費了CPU的一點資源用來計算,其余全是定時器自動完成,而且在兩次調制之間沒有任何延遲。
3 系統實驗
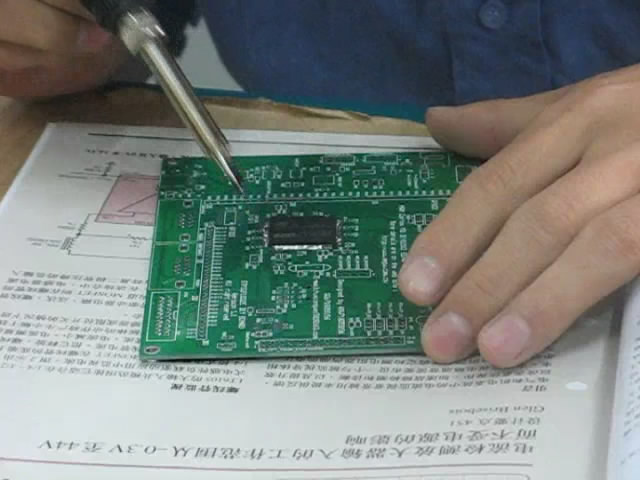
3.1 實驗硬件電路
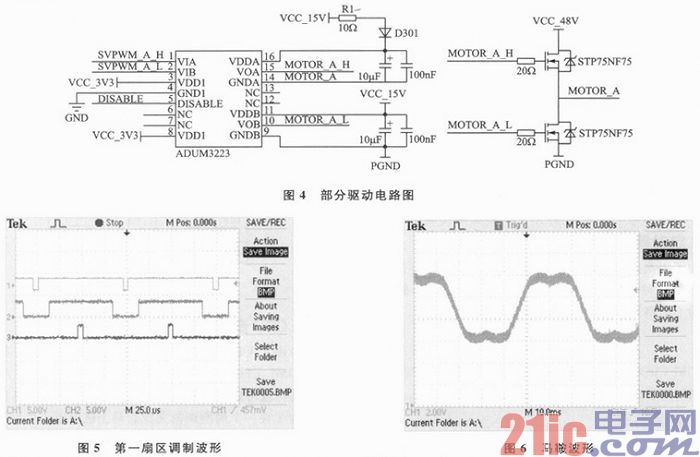
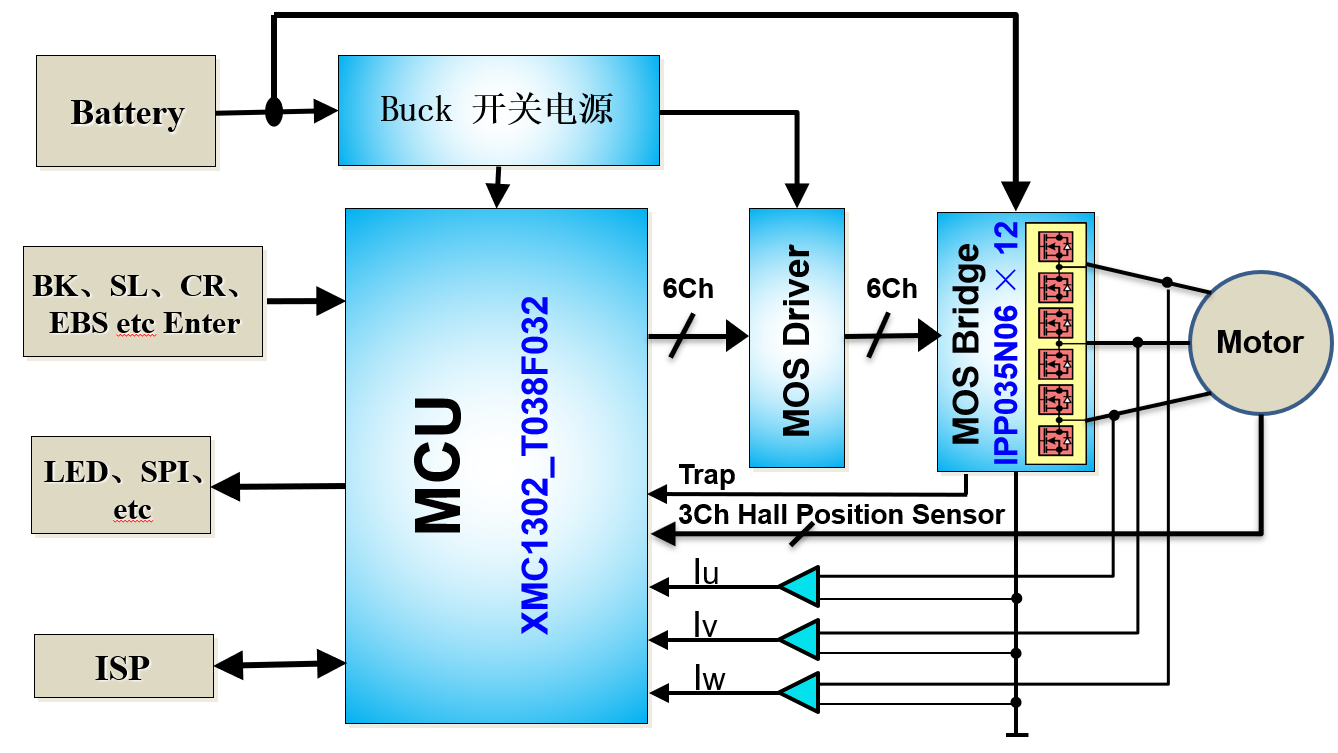
實驗硬件電路包括主控芯片及外圍電路、MOS驅動器和由6個MOS管組成的逆變器。其部分電路如圖4所示。ADUM3223驅動器的輸入來自STM32F103VET6中TIM1的CH1和CH1N,兩者為互補輸出。使能輸入端連接到芯片的PE15引腳,并且有一個4.7 KΩ的上拉電阻。在輸出端的高端設計了一個泵電源,保證高端MOS管能夠可靠導通。R1用來保證充電速度不會過快,可根據實際需求更改大小。在MOS管的柵極有一個限流電阻,用來防止MOS管漏源極電壓dv/dt太大,導致損壞。
3.2 實驗結果
由于SVPWM的輸入為αβ坐標系下的Uα和Uβ,在讓矢量運行軌跡為圓形時特別困難,所以在輸入端前加入了一個Park變換算法,使其變為Ud和Uq。這樣只需要設置合成矢量的角度和大小,而角度可以人為設為一個勻速圓周運動的值。圖5為第一扇區下的調制輸出波形。圖6為矢量圓周運動時,輸出相電壓濾波后的馬鞍波形。
結語
由實驗結果可知,該設計方案可以方便地實現SVPWM輸出,計算量并不大。其功能主要是靠硬件實現,所以占用CPU資源很少,完全可以當作一個模塊應用到其他場合中。



評論