高速無軸承永磁薄片電機

4 電機結構
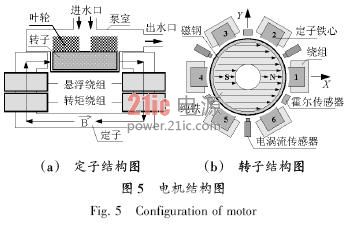
本文無軸承永磁薄片電機采用六齒三相1 對極結構。定子外圈向下折,成立體形狀,如圖5(a)所示。此外,六個齒上加上了齒靴,減少了轉子磁場的漏磁,提高永磁體的利用率。同時電機的磁路通過定子底層硅鋼片形成回路。定子每一齒極繞有一套懸浮繞組和一套轉矩繞組。轉矩繞組采用1 對極結構,有助于降低電角頻率,適于高速運行。霍爾角度傳感器和電渦流位置傳感器交替嵌于齒靴之間,如圖5(b)所示。定子線圈采用集中式繞組,可降低電機設計的復雜度,而且便于負載(如泵殼)的安裝,同時,齒與齒之間留出的空隙,為傳感器的安裝也提供了足夠的空間。
1 對極無軸承永磁薄片電機的樣機如圖6 所示。電機定子外徑116 mm,鐵心長度80 mm,采用的材料是普通0.25 mm 硅鋼片,線性相對磁導率約為3 000。每套轉矩繞組線圈有282 匝,每套懸浮繞組線圈有102 匝。轉子外徑53.2 mm,內徑14.4 mm,軸向長度14.5 mm,磁鋼為表貼式,材料為高能永磁材料(釹鐵硼),剩磁1 050 mT,矯頑力844 kA/m,厚度2.5 mm,定轉子間氣隙3 mm。

5 控制系統和功率系統
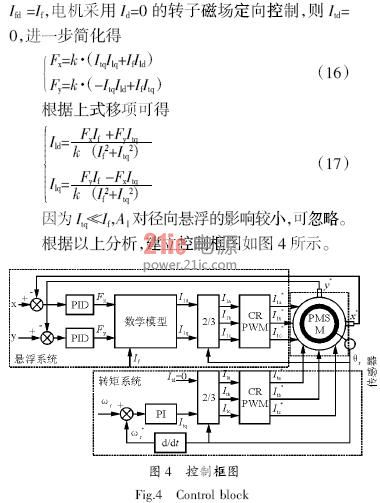
無軸承永磁薄片電機的控制系統由調制電路和以數字信號處理器(DSP)TMS320F2812 為核心的控制器組成,實物如圖7 所示。TMS320F2812DSP芯片功能強大,運行速度快,具有豐富的片內外圍設備。150 MHz 的時鐘頻率保證了高轉速下控制策略的運算;利用IQmath 實現以C 語言為主體,局部調用匯編指令的方式編寫的控制系統程序,可實現坐標轉換和PID調節器的模塊化調用,從而簡化了程序存儲空間,提高了軟件質量;且芯片集成16 路的12 位模-數轉換器,為無軸承永磁薄片電機所需的電流傳感器、霍爾角度傳感器、電渦流位置傳感器提供了足夠的通道和精度。
功率系統是整個無軸承永磁薄片電機系統中的執行機構,負責完成控制器發出的指令。采用兩套三相電流控制型PWM 逆變器(CRPWM),可以方便地控制轉矩繞組和懸浮繞組的三相電流。開關頻率為16 kHz。
6 電機性能試驗
考慮到無軸承永磁薄片電機的轉子沒有軸承支撐,試驗研究時,首先要實現電機的穩定懸浮。
圖8(a)為靜止懸浮時轉子在x方向和y 方向的位移波形。可以看出,當電機靜止懸浮的時候,轉子x、y 方向的位移波動范圍約20 滋m,實現了穩定懸浮。圖8(b)為懸浮電流閉環波形,Ila、Ila* 分別為a相懸浮繞組的給定電流和反饋電流。由于永磁體提供了懸浮力偏置磁場,只需極小幅值的懸浮電流即可實現電機的穩定懸浮。
啟動轉矩控制系統,給定250 Hz 的轉速,經過轉速閉環和轉矩繞組電流閉環,實現Itd=0 的轉子磁場定向控制,經過2 s的加速過程,轉速超過15 000 r/min,見圖9。轉子y 方向的偏移波形顯示,在啟動階段,轉子的徑向偏移嚴重,幅值達到160 滋m,但仍處于懸浮狀態。經過短暫調整,轉子徑向偏移趨于穩定,實現了電機高速懸浮運行。

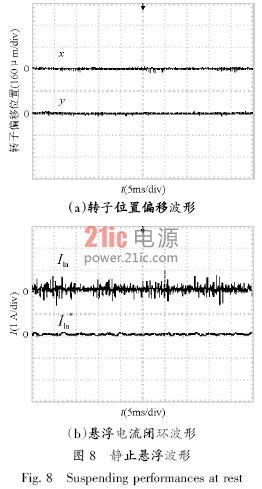
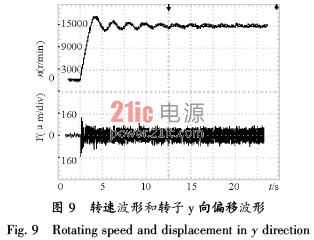
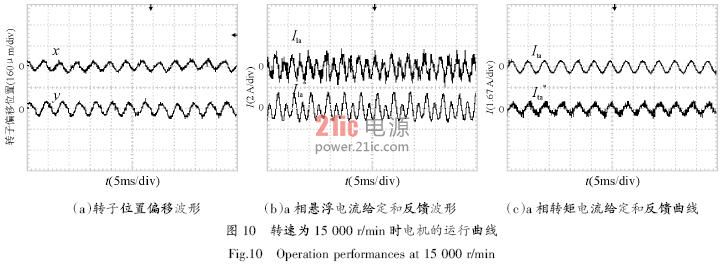
圖10(a)為電機轉速穩定在15 000 r/min 時的轉子位移波形,轉子繞徑向平衡位置上下移動,偏移的幅值已在80 滋m左右。相較于電機靜止時的穩定懸浮狀態,此時為克服轉子高速旋轉時徑向的不穩定性,徑向懸浮力隨之增大,懸浮繞組的電流幅值亦增大,幅值已接近1.5 A,如圖10(b)所示。通過懸浮系統電流PI 環節的閉環作用,a相懸浮繞組的反饋電流能夠始終跟隨給定電流,滿足懸浮磁場的定向控制要求。圖10(c)為電機平穩運行時a 相轉矩繞組的給定電流Ita 和反饋電流Ita* 波形,通過轉矩電流PI 環節的閉環作用,轉矩的反饋電流和給定電流基本重合,幅值保持在0.6 A左右。
7 結語
本文推導了1對極無軸承永磁薄片電機的徑向懸浮力數學模型,并對數學模型進行了適當的簡化,降低了數字控制的復雜性;分析了原理樣機的結構特點,搭建了控制系統和功率系統;最后對樣機進行了高速運行試驗,轉速在15 000 r/min時,轉子徑向移幅約80 滋m。且電機轉速可在0耀15 000 r/min 之間連續調整,實現了全轉速的穩定懸浮運行。


評論