基于自適應觀測器的三電平無速度傳感器DTC 系統

0 引言
本文引用地址:http://www.j9360.com/article/201808/387285.htm在各種電動機控制策略當中,直接轉矩控制(DTC)方法作為一種優秀的高性能方案,其簡單的結構、清晰的物理概念以及良好的控制性能引起了學者們的廣泛興趣。DTC 目前在兩電平逆變器上已經有很多研究成果,但是在多電平逆變器上的應用還比較鮮見。多電平逆變器克服了傳統逆變器較高的dv/dt、di/dt所引起的開關應力,改善了其輸出波形,是當前的研究熱點之一[1]。傳統兩電平逆變器只有6 個非零矢量,實現DTC 時的扇區劃分和電壓矢量的選擇都已比較成熟。而三電平的非零矢量較多,在實現DTC 時,就出現了如何更有效、更合理的劃分區間和選擇電壓矢量的新問題;同時,多電平逆變器的輸出電壓不能有過高的跳變,而對于應用廣泛的三電平中點箝位結構的逆變器而言,還需要控制中點電壓的漂移。本文采用了一種基于合成矢量的三電平DTC 控制方法,能夠有效地簡化DTC 的矢量選擇,同時還成功實現了對輸出電壓跳變的抑制和對中點電壓的控制。
在高性能的電動機控制當中,能否準確地檢測磁鏈對系統控制性能有著關鍵性的影響,特別是在低速范圍內[2]。本文采用了一種新型自適應全階狀態觀測器方法,可以更準確觀測定子磁鏈,并具有較好的魯棒性,為提高系統控制性能提供了保障,同時可以全速范圍內較準確的辨識轉速。本文詳細描述了一種基于自適應全階狀態觀測器的三電平DTC 控制方法,在利用合成矢量方法控制逆變器的基礎上,能夠準確地觀測定子磁鏈,同時辨識轉子轉速,實現高性能的DTC無速度傳感器運行。
1 基于合成矢量的三電平DTC 原理
1.1 三電平電壓矢量與DTC
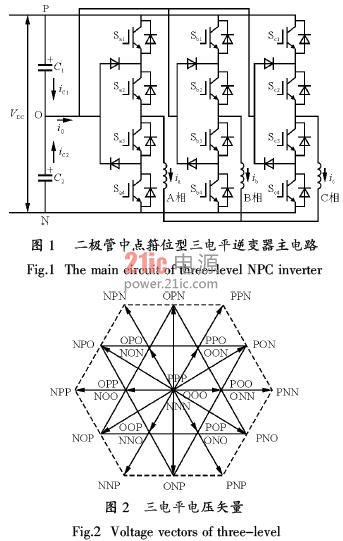
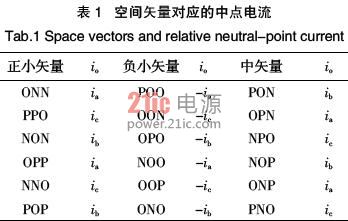
圖1 是三電平二極管中點箝位逆變器拓撲結構。三電平逆變器共有27 種開關狀態,分別對應于19個電壓矢量。根據電壓矢量在空間的位置,可以得到三電平逆變器矢量空間圖,如圖2所示[1]。與兩電平DTC 相比,使用三電平逆變器實現DTC,逆變器電壓矢量變得豐富,扇區劃分能進一步細化,能夠很好的改善轉矩的輸出特性。但同時,由于三電平逆變器的特點,控制起來也變得更加復雜,表現在以下三個方面。
1.1.1 電壓矢量選擇復雜
如上所述,三電平逆變器含有27 種電壓矢量,與兩電平相比要多得多,可以分為四類:長矢量、中矢量、短矢量和零矢量。其中零矢量有3個,矢量長度為0,分別為PPP,OOO,NNN;6 個長矢量,矢量長度最長,對應圖2 中外六邊形的頂點,分別為PNN,PPN,NPN,NPP,NNP,PNP;6 個中矢量,其長度略短,位于每個60毅扇區的角平分線上,分別為PON,OPN,NPO,NOP,ONP,PNO;12 個短矢量,其長度僅有長矢量的一半,而且成對出現,位于內六邊形的頂點上,分別為POO,ONN,PPO,OON,OPO,NON,OPP,NOO,OOP,NNO,POP,ONO。
1.1.2 中點不平衡問題
中點不平衡問題是由二極管中點箝位型三電平逆變器自身拓撲結構引起的固有問題,在很大程度上限制了三電平逆變器的廣泛應用。為了方便分析三電平逆變器中點電位不平衡的本質原因,引入函數Sij,其中i 表示第i 相(i=a,b,c),j 表示i相的開關接到哪個點(j=P,N,O),電流方向如圖1 所示。
直流側節點O的電流關系方程為

由式(1)不難看出,只要中點有電流,即只要三相中的三個開關有連接到中點O的時候就可能會影響中點的電位。中點電流不為零是導致中點不平衡問題的根本原因。表1 列出了影響中點平衡的矢量與對應的中點電流的關系。
1.1.3 過高幅值跳變問題
在三電平電路中,無論相電壓還是線電壓,每次開關動作都要求不能產生超過直流母線電壓VDC一半的變化,故應對逆變器輸出電壓dv/dt加以限制,尤其在高壓大功率的應用上。例如相電壓不允許在電平P和N之間直接跳變,否則三電平拓撲就失去了自身的優勢。而線電壓也會產生過高的電壓幅值跳變,如矢量切換時線電壓跳變幅值超過了直流母線電壓的一半,這種情況對逆變電路本身影響不大,但對電機的絕緣要求就大大提高了,所以也應該避免[1]。
1.2 合成矢量方法
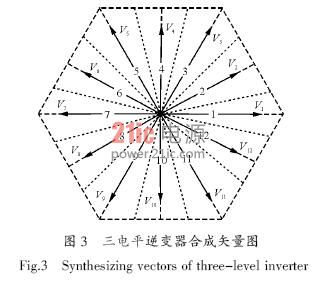
為了解決上述問題,本文采用合成矢量的方法。采用合成矢量方法首先就是要結合系統特征和控制的需要確定合適的合成矢量方案。如前所述,在三電平逆變器空間電壓矢量調制過程中,有兩個方面的因素需要特別加以考慮:一是輸出電壓跳變的抑制,另一個是中點電壓的控制。本文采用的合成矢量是由逆變器輸出的27個空間電壓矢量按照固定的方式合成,均勻地分布在琢-茁平面上,其方向是固定的,僅長度可調,如圖3所示。
其中虛線六邊形的頂點是原三電平長矢量頂點的位置,以原來中長矢量所在直線為中心線,將琢-茁平面劃分為12 等分,并按圖示順序編號。電壓矢量Vi(i =1耀12)是所在扇區i的合成矢量,其合成方法是:當i 為奇數時,是由該區間i 所對應的大矢量和兩個短矢量組合而成。大矢量本身不會影響中點電壓,但會導致過高的電壓幅值跳變,使用短矢量有助于消除高電壓幅值跳變,為了保證中點電位總體不受影響,合成時兩個短矢量的作用時間必須相同。例如扇區1 所對應的合成矢量V1 是由大矢量PNN 和兩個短矢量POO、ONN 組合而成,且小矢量POO和ONN作用時間相同。當i 為偶數時,由該區間i 所對應的中矢量和相鄰的兩個短矢量合成,并且保證三個矢量作用時間相同,例如扇區2 所對應的合成矢量V2 是由中矢量PON和相鄰的兩個短矢量PPO、ONN組合而成。由于所選的中矢量和短矢量作用時間相同,對應的平均中點電流im=ia+ib+ic=0,假定采樣周期足夠短,因此中點電壓在這個采樣結束后就回到了初始狀態,即總體上不受影響。這樣就可以有效地將三電平逆變器的PWM控制和異步電動機的DTC 控制加以分離,相對獨立地實現不同的控制目標,從而避免了互相矛盾的問題,為提高控制性能拓展了空間。
1.3 基于合成矢量的DTC
按照上述的方法,在同一采樣周期內相鄰矢量之間的切換不會產生過高的電壓跳變,但在某些情況下,無法避免前后兩個采樣周期的首尾矢量會產生過高的電壓幅值跳變。所以本算法中,在每個周期首尾加入一個固定作用時間的零矢量(PPP 或者NNN)來實現平穩切換,雖然這樣降低了直流側電壓的利用率,但是有效防止了輸出電壓矢量突變的問題。
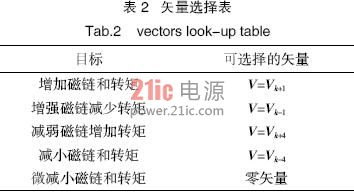
基于三電平逆變器的12 個合成矢量,加上三電平逆變器原有的3 個零矢量,共15 個矢量。按照兩電平直接轉矩控制的原理,可以建立起一個基于合成矢量的優化矢量表,如表2 所列,其中k 表示當前所在扇區,V表示下一采樣周期所選矢量。
2 自適應全階狀態觀測器
2.1 全階狀態觀測器
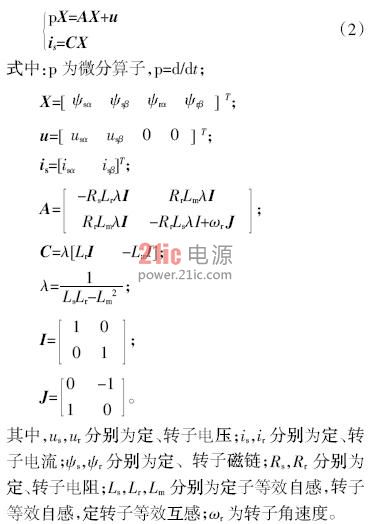
基于一些假定,在兩相靜止坐標系下,感應電機可用如式(2)所示的狀態方程表示。

2.2 速度自適應律選取
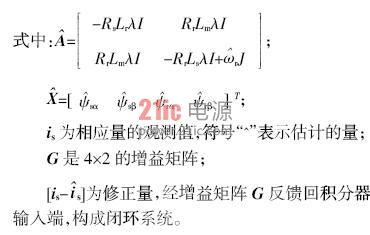
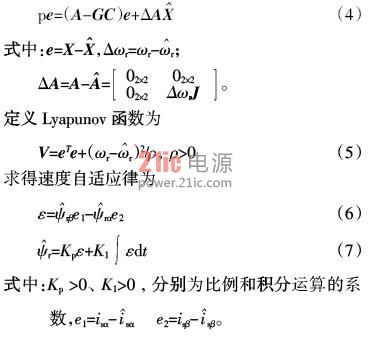
注意到自適應全階狀態觀測器是非線性的,所以采用Lyapunov 函數穩定定理來設計速度自適應律[3]。利用式(2)和式(3),可以得到定轉子磁鏈的誤差關系為













評論