如何基于TMS320LF2407設計運動相機控制系統?

隨著計算機和信息技術的飛躍發展,使具有快速和高精度處理能力的DSP出現并廣泛應用。本文設計了一種通過DSP實現對運動相機控制的系統,可以使常規方式無法進行的拍攝工作變得輕松,并能達到理想效果。實現了相機快速到達指定位置,進行5點拍攝,并確保拍攝到的圖像不失真。
本文引用地址:http://www.j9360.com/article/201808/385100.htm1系統原理
基于TMS320LF2407的運動相機控制系統框圖如圖1所示。

DSP在GPIO的驅動下將輸入的指令進行處理,經過光電耦合和功率放大后,驅動步進電機工作,步進電機和相機機架上的齒輪結構連接,控制相機完成5點拍攝工作。
運動相機的控制原理如圖2所示。運動相機控制系統需要完成相機在某個時刻快速運動到指定位置1點,立即停止,對準目標拍照并保證圖像清晰,然后以同樣標準在位置2點、位置3點、位置4點、位置5點拍照,再按原路快速返回到位置1點,等待下一個拍攝周期的到來。
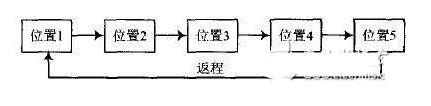
圖2運動相機控制原理
2系統硬件設計
在運動相機控制系統中,需要控制相機做“重復啟停”運動,即在某些時刻要求相機快速運動,在特定時刻迅速停止,并能保證停止時相機靜止不動,確保拍攝到的圖像不失真。因此要求所選電機應易于啟停控制的同時,還要具有鎖定能力。本系統采用運動控制系統中廣泛應用的步進電機作為執行元件。
步進電機是根據組合電磁鐵的理論設計的,是一種將有效電脈沖信號轉變為相應的角位移或直線位移的開環控制元件。步進電機通過專用的電源把電脈沖信號按一定順序供給定子各相控制繞組,在氣隙中產生類似于旋轉磁場的脈沖磁場,使每給步進電機加一個脈沖信號,步進電機就移動一步。步進電機的轉速、停止的位置只取決于輸入脈沖信號的頻率和脈沖個數,不需要反饋信息和A/D轉換,能夠直接將數字脈沖信號轉化為可控角位移。步進電機只有周期性的誤差而無累積誤差、可以在相當寬的范圍內平滑調速、具有一定的自鎖能力和易于啟停控制等特點,非常適合運動相機控制系統。步進電機的控制系統如圖3所示。當步進電機和負載已經確定之后,整個驅動系統的性能就完全取決于驅動電源和控制方法,步進電機驅動器由脈沖信號、信號分配、功率放大器幾部分組成。脈沖分配方式采用軟件脈沖分配,采用軟件進行脈沖分配不用改變硬件線路,只需修改軟件程序就能完成控制方案修改,不僅降低了成本,還提高了可靠性。

圖3步進電機控制系統框圖
根據電機所帶負載相機的動力學要求、控制相機掃拍過程中電機運動規律和相機曝光時間的關系,選擇使用ASM46AK-H100的諧波減速步進電機。 ASM46AK—H100步進電機減速比為1:100,最高分辨率設定為0.36(°)/脈沖,轉矩為5N.m,最大轉矩為11N.m,電源輸入電流為 1.7A,電源輸入電壓DC24V,最大輸入脈沖頻率為250kHz(脈沖占空比50時),速度/位置控制指令是脈沖序列輸入,容許速度范圍為0~24r /min,能滿足CCD的要求。在過載保護、過壓保護、速度差異常保護、速度過快、EPROM數據錯誤、傳感器異常、系統異常等保護功能工作時,輸出警報信號,電動機自然停止。
步進電機驅動器選擇配套的ASD18A-K驅動器,ASD18A-K驅動器提供控制用電源、轉速控制脈沖、運動方向控制脈沖、A相脈沖輸出、B相脈沖輸出、定時、警報、分辨率轉換和電流切換等電氣接口。ASD18A-K驅動器可以通過功能轉換開關調節分辨率、脈沖輸入方式、電流大小,轉速大小等,合理選擇參數可以抑制低速運行時的振動,使啟動時的動作更為平穩。
DSP選擇高性價比且性能優異的數字信號處理器TMS320LF2407,集成了A/D、PWM發生器、光電編碼器、接口電路等片內外設。具有豐富的片上資源,544BDARAM,2KBSARAM,32KBFLASH,2個事件管理器(每個均包含2個16位的通用定時器、8個PWM通道、3個捕獲單元)用于產生驅動電機的PWM波形,16通道10位,轉換時間為500ns的ADC模塊實現模擬控制量的A/D轉換、豐富的外部存儲器接口(192K×16b:64KB的程序存儲器,64KB的數據存儲器、64KBI/O實現DSP與鍵盤及液晶顯示光電耦合器起隔離和電壓轉換的作用)、看門狗模塊、CAN、SCI、多個GPIO、5個外部中斷、PLL等。非常高的運算性能,最高可達40MIPS,指令周期25ns.具有豐富的開發資源,JTAG、CCS、完備的技術文檔支持、144pinLQFP封裝。TMS320LF2407的I/O輸出是3.3V的CMOS電平,采用245緩沖器轉換成TTL電平后驅動步進電機驅動器ASD18A-K,ASD18A-K完成細分、環形分配和功率驅動。
3系統軟件設計
控制系統程序由主程序、子程序和中斷子程序組成,主程序完成系統初始化及各變量的初始化,子程序完成各控制面板的掃描,中斷子程序實現控制面板上各參數設定的功能。相機控制流程圖如圖4所示。
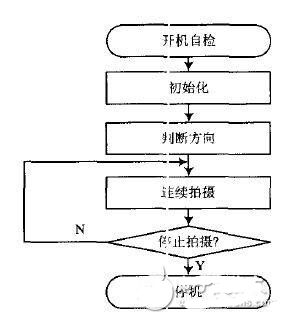
圖4相機控制流程圖
由于TMS320LF2407通過I/O口和驅動器連接,需要對接口初始化定義,IOPC5被配置為基本功能方式;PWM3IOPB2,IOPB5被配置為通用I/O方式;IOPC5被配置為通用I/O方式;在步進電機驅動程序設計中,充分運用TMS320LF2407控制器的事件管理模塊。在 TMS32OLF24O7中各有一個16位比較寄存器CMPRx(x=4、5、6),每個比較寄存器各有兩個比較PWM輸出引腳,產生3路PWM輸出信號,控制電機轉速(位置),其輸出引腳極性將由控制寄存器(ACTR)的控制位來決定,根據需要選擇高電平或低電平作為開通信號。在PWM后號調制中需要周期一定的載波,這時用到了定時器3,它以內部CPU時鐘作為輸人,工作于連續增/減計數模式下,產生PWM脈沖輸出,產生的脈沖為一個環形可變脈沖,這時由T3PR定時周期下溢和上溢時產生中斷,刷新周期值,進行PWM調整。











評論