詳解Uber自動駕駛汽車傳感器系統

可以說,該系統不具備在弱光線環境下進行探測的性能,也無法為汽車提供遠距離探測服務。可能正是因為這樣,特斯拉自動駕駛汽車的路測和應用才一直不是很順利。
本文引用地址:http://www.j9360.com/article/201804/377962.htm回到國內,在自動駕駛領域,百度無人車近期可謂是風頭正勁,更是在前幾天拿到了北京市首批自動駕駛測試試驗用臨時號牌,并在北京亦莊正是開啟了自動駕駛汽車上路測試。
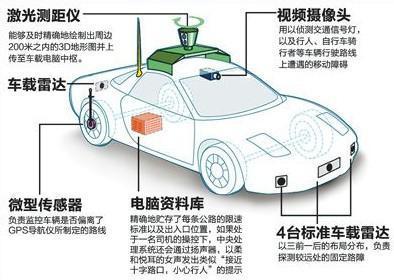
從這張網傳的百度無人車硬件配置圖看,百度的傳感器系統以雷達為主+攝像頭為輔的搭配方式,來實現自動駕駛的,包括一個車頂的Velodyne激光雷達;多個車載雷達,分布于汽車前后端;一個攝像頭,用于偵測移動障礙物。
這種搭配方式,實現了汽車遠距離大范圍探測。除此之外,相較于特斯拉,由于有了Velodyne激光雷達(單價約7萬美元)的加持,讓百度自動駕駛汽車具備了在暗光、密集環境中的行駛功能。當然,成本也相對較高。
搭配方案應因地制宜,適配應用場景才是重點
其實,上面這些也僅僅是基于普通應用場景對汽車自動駕駛性能的一個基礎判斷。無論是Uber、特斯拉還是百度,在當前的路測階段,他們都還不能保證,自家自動駕駛汽車能在任何環境中做到安全行駛。
舉個例子,在高速公路上,由于車速較快且視野較開闊,自動駕駛汽車就需要具備遠距離、大范圍探測的能力。而由于行駛道路的開放性,難免會遇到雨雪、大霧等極端天氣,那么,普通的攝像頭和高成本的激光雷達就無法負荷這一需求,這種情況下,諸如百度那樣的硬件系統就不實用了。
“在高速公路的高速行駛中,因激光雷達的射距問題,我們更依賴攝像頭。”圖森未來聯合創始人&CEO陳默表示。
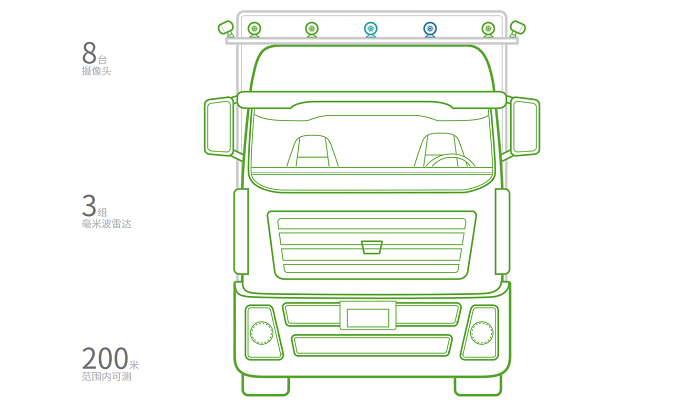
因此,致力于打造高速場景下的L4級別(SAE)自動駕駛卡車的圖森未來,其傳感器搭配方案就以遠距離、高感知的攝像頭為主。一輛卡車上,共搭載了8個攝像頭、3組毫米波雷達,適用范圍達200米。
除高速公路之外,城市街道也是未來自動駕駛汽車最大的應用場景之一。而在這一場景下,遠距離大范圍探測就無法滿足實際需求了。
中國的城市街道特點,在于人群、車輛、建筑物密集;信號燈、指示牌繁多等。想要在這樣的環境下做大安全自動駕駛,汽車就必須具備實時精準探測、高度感知環境(環境光、障礙物具體細節及狀態等)以及高速識別分析圖像的能力。這種情況下,這有攝像頭和毫米波雷達就有些不夠用了,必須搭載高精度激光雷達,甚至不止一個。

“目前自動駕駛汽車搭載激光雷達,大部分是為了滿足功能性需求。”速騰聚創COO邱純潮說,“那么要保證安全,就必須強調安全冗余通過多重備份來增加系統的可靠性),Cruise就是用了5個激光雷達來解決這一問題的。”
總結
當然,自動駕駛汽車想要安全上路需要考慮的不僅是高速、密集環境,黑暗、強對流天氣等也是行業重點關注的問題。
就當前各大廠商的自動駕駛汽車傳感器硬件系統看,雖有一定偏向,如以攝像頭為主的特斯拉和以雷達為主的百度、Cruise等,但都選用了攝像頭+雷達綜合運用的方案。
“我們認為,未來的自動駕駛汽車傳感器硬件系統,一定會是各傳感器相互融合的。”陳默說。
自動駕駛行業才剛剛開始,需要一步步來,想要一步到位地解決問題是不現實的。正如美國國家運輸安全委員會前主席馬克·羅森克所說,我們應該對自動駕駛寬容一點。但需要強調的是,安全問題無小事,寬容也要在可允準的范圍內,以免發生悲劇。






評論