三相可控硅半控橋數字觸發器的設計

一、引言
本文引用地址:http://www.j9360.com/article/201710/367055.htm三相可控硅橋式半控整流電路可以在交流電源電壓不變的情況下,通過改變可控硅的觸發電路控制角來實現對整流電路直流輸出電壓的控制,這種電路在中等容量的整流裝置或不要求可逆的電力拖動系統中應用較為廣泛。傳統的三相橋式半控整流電路需要三套獨立的模擬式觸發器來觸發可控硅,由于模擬式觸發器存在著線路復雜、調整困難、可靠性低的問題,為此,本文提出一種用80C196KC單片機組成的數字觸發器電路,控制電路大為簡化,所產生的觸發脈沖具有移相范圍寬、控制精度高,動態響應快、穩定可靠的特點,其性能指標優于模擬式觸發器。
二、電路組成及原理分析
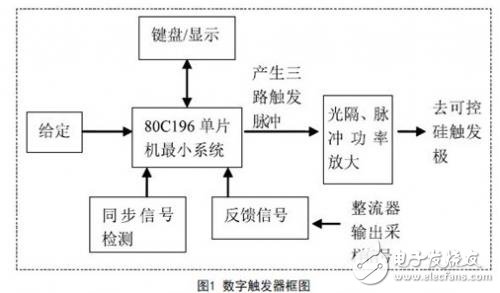
1.三相可控硅半控橋式整流電路的數字觸發器由80C196KC單片機最小系統、同步檢測電路、脈沖功率放大電路組成,如圖1所示。單片機8 0 C 1 9 6 K C、鎖存器、27C256程序存儲器、62C256數據存儲器構成最小系統。80C196KC為Intel公司16位高性能單片機,它的功耗極低,除正常工作外,還可以工作在待機和掉電兩種節電方式。其工作速度比51單片機高數倍。總線寬度為8/16位可選,而內部寬度總是16位的。80C196KC內含 8路10位A/D轉換器,512字節RAM,2個硬件定時/計數器,一個監視跟蹤定時器,晶振為12MHz.單片機根據給定與反饋信號的差值,經運算后形成控制角為α的移相脈沖從HS0.0~0.2口腳輸出。
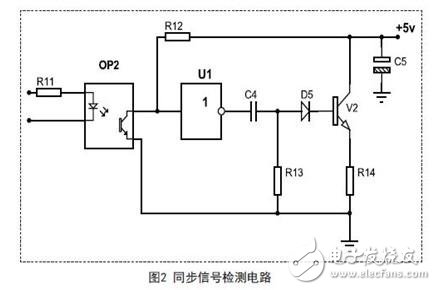
2.同步信號檢測由光電隔離、比較器和整形電路組成(如圖2)。由同步變壓器送過來的線電壓UAC的過零點時,在光電隔離器的輸出端產生一個方波,經反相器U1整形、RC電路微分后產生一個脈沖作為外部中斷信號加到80C196KC的EXTINT端,實現觸發脈沖與電源同步。為了簡化電路,本系統采用了相對觸發方式,只需要單相同步即可。
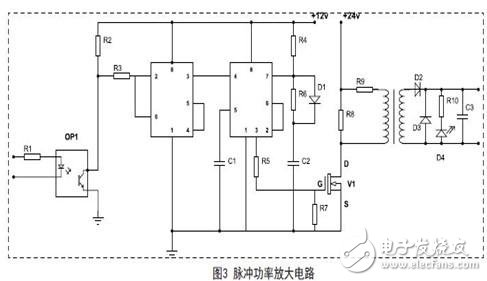
3.脈沖功率放大電路。如圖3所示,為了實現對大電感負載的可靠觸發,本觸發電路使用脈沖序列觸發方式。從單片機端口HS0.0~0.2輸出的脈沖送入由555組成的脈沖簇形成電路,經過場效應管功率放大和脈沖變壓器隔離后,輸出到可控硅的觸發極。
三、控制角算法
可控硅控制角α由下式求出:
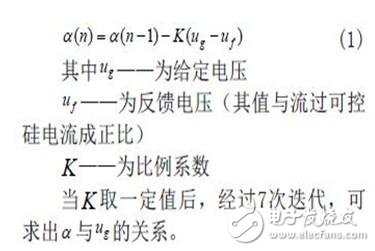
大電感負載時,三相半控橋式整流電路輸出電壓Ud與控制角α的關系為:

上式表明三相半控橋式整流電路輸出電流Id與控制角α是非線性的,而(1)式是建立在線性化基礎上的,所以必須通過下面的式子予以修正:
為了簡化程序,采用U給定-ω-α′查表方式獲得控制角α。由于單片機的A/D轉換器為10位的,給定電壓5V經過A/D轉換后為3FFH=1023,若分成51檔,則:
所以ω=33H正好對應給定電壓U=5V;當U=4.9V時,二進制數為1003H,則:
其余類推,即正好0 。 1 V對應0 1 H,0.2V對應02H,…等,這樣便于查表。
利用一個過零檢測電路在同步電壓UAC從負半波到正半波過零時刻產生同步脈沖,因為UAC落后于相電壓UA30°,所以同步脈沖出現的時刻正好是A 相電壓的自然換相點,A、B、C各相的自然換相點彼此相差120°,當A相的自然換相點找到后,其余B、C相的自然換相點彼此相差時刻為T/3,T為上次測到的電壓周期,可用測量相鄰兩個同步脈沖的時間間隔得到。
設2 T、1 T分別為本次同步脈沖出現的時刻和上次脈沖出現的時刻。當1 T 》 1 T時,則:
在每一相的自然換相點出現時刻起動軟件定時器(其整定時刻為αt ),軟件定時器到時時刻即為該相發出觸發脈沖(控制角為α)的時刻。
三相橋式半控整流電路帶大電感負載時的移相范圍為0~180°。當控制角α大于120°時,相鄰兩個可控硅觸發電路可能同時工作,所以在模擬式觸發電路中每個可控硅必須有自己的觸發電路。由于一個單片機只能組成一個數字觸發電路,為了使三相電路能共用一個觸發電路,我們必須將控制角α限制在120°以內。這可以通過改變觸發順序的辦法來實現。
當α1 2 0°時,按理應在120°~240°時VT1,以后每隔120°觸發VT2、VT3,但也可以0~120°時以α′=α-120°觸發VT3,過120° 以后以α′觸發V T 1.顯然兩者是等效的,但這樣處理后,控制角可以限制在120°以內,就可以共用一個觸發器了。
四、軟件設計
數字觸發器的程序由主程序、同步電路中斷處理子程序、軟件定時中斷處理子程序、鍵盤與顯示處理子程序等四個模塊組成。為了提高指令運行速度,本電路所有程序采用匯編語言編寫,而且采用了模塊化結構,為程序的編寫和修改提供了方便。本文簡要介紹前三個模快。
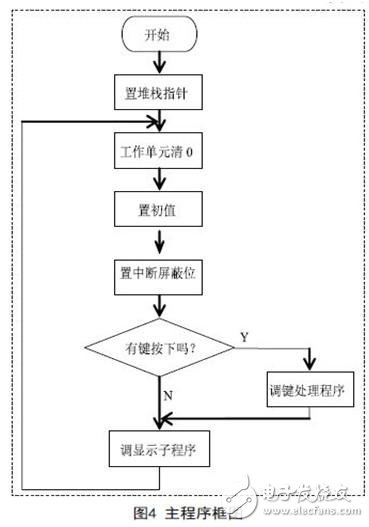
1.主程序主要完成80C196單片機的堆棧指針設計、清工作單元、設置初始值、開放中斷、鍵盤掃描等的初始化工作,框圖如圖4所示。
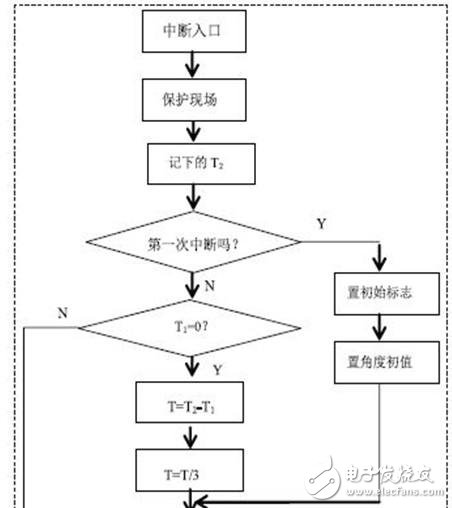
2.同步電壓中斷子程序。當同步電壓由正半波到負半波過零時刻產生一個尖脈沖,加到單片機的EXTINT端引發外部中斷。
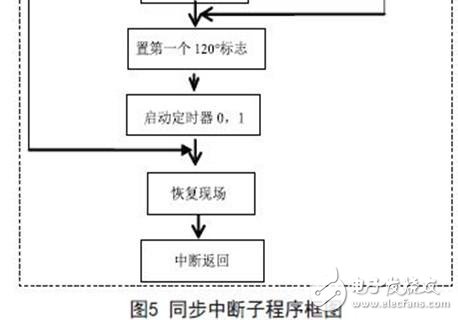
在中斷服務子程序中完成置角度初值,測量及計算電源電壓周期,設置第一個時間間隔,啟動軟件定時器0和定時器1.軟件定時器0中斷處理子程序。控制角α用一個軟件定時器產生定時時刻來獲得。當同步脈沖出現后,此即為A相的自然換相點(即A相α=0的時刻),此時將與控制角對應的時刻置入軟件定時器0.當軟件定時器到時后,一方面發出A相的觸發脈沖,另一方面又將T/3時刻置入軟件定時器0;當軟件定時器到時,一方面發出B相的觸發脈沖,另一方面又將T/3 時刻置入軟件定時器0;當軟件定時器到時,發出C相的觸發脈沖,此時不可再將T/3時刻置入軟件定時器0.很明顯,當給定電壓固定時,A、B、C三相的觸發脈沖一定是相差T/3的,所以在A相的同步脈沖出現后,將αt置入軟件定時器0,軟件定時器0到時時刻所就是所需的A相脈沖的控制角α。在子程序中完成給定電壓與反饋電壓的采樣,控制角α計算,標度變換以及將控制角度數值送到顯示緩沖區等工作。程序框圖略。圖5是同步中斷子程序框圖。
采用16位單片機80C196KC系統,器件減少、結構緊湊,整個觸發器電路大為簡化,并且,由于單片機運算速度快,采樣與顯示可以在兩次同步信號之間完成而且每次同步信號都被采樣,因而中斷程序可以按照最新的采樣數據調整觸發脈沖的移相角。實驗表明,該觸發器的動態特性好、控制精度高。





評論