DLP技術:實現新一代汽車抬頭顯示系統

引言
德州儀器DLP投影技術是一項被廣泛使用的成熟技術,用于多種顯示應用,包括:手持投影機、會議室和數字影院。DLP技術可滿足先進的HUD系統的需求。DLP電子系統可支持視頻處理和格式化,滿足需要圖形和視頻圖像的未來HUD系統的需求。高動態范圍LED控制系統的概念已被證明可提供在白晝和黑夜觀看的條件。此外,借助基于DLP技術的光學設計實施,相關人員可更加靈活地解決未來汽車HUD系統的光學設計難題、外形規格限制以及熱負荷管理等問題。
DLP電子系統概述
DLP汽車抬頭顯示系統的概念包含兩個子系統,即利用DLP控制器芯片的視頻處理和格式化子系統,以及利用Piccolo微控制器(MCU)的LED控制系統。圖1展示了一個典型的DLP抬頭顯示系統應用。
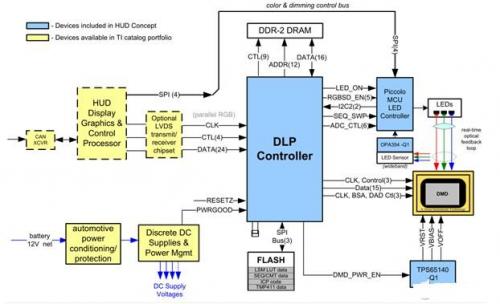
圖1.典型的DLP抬頭顯示系統應用
DLP HUD控制器負責接收和處理從外部顯示圖形處理器接收到的視頻和命令,它能夠接收24位并行視頻數據,其幀速率高達60Hz.所接收的視頻數據經過可編程圖像縮放、灰度、子圖像支持以及邊框調整因素等處理后,最終數字輸出給DMD,以呈現最終圖形顯示。此外,DLP HUD控制器還提供啟動紅色、綠色和藍色LED的頻閃信號,與DMD器件上正在顯示的數據保持同步,從而呈現高亮度、高度飽和色彩和具有極快顯示速率的高對比度圖形。
基于Piccolo MCU的LED控制系統負責精確控制整個工作溫度范圍以及紅色、綠色和藍色LED的老化范圍內的色彩和亮度。此外,它還支持高動態亮度的自然調光,適用于HUD應用的白天和夜間駕駛情況。
LED控制系統采用基于PWM滯后控制方法的光通量反饋方案。在連續模式(CM)中,整個輸出LED使能脈沖時段都以近直流電(DC)方式開啟LED光源,持續保持固定的光照水平。在斷續模式(DM)中,每個脈沖幅度由相同的滯后控制環路控制,但只能啟用已觸發的脈沖光源。DLP控制器可計量每個LED具體的脈沖數量。斷續模式在保證控制精度的同時,允許采用極低的輸出通量水平。
LED溫度升高和LED老化將導致要用更高的電流電平才能產生所需的光通量水平。當光通量控制環路達到所需的光通量水平之前就已達到最大的LED電流時,Piccolo MCU會感知到這種情況,并相應地按比例降低所有3個LED通量水平,直到所有LED返回到光通量反饋控制之下。通過這種方式,該系統可在LED的整個使用壽命提供最佳圖片,并實現終極亮度水平。
LED控制系統通過SPI總線輸入接收來自上行控制光源的亮度/調光控制命令。Piccolo解析LED控制系統的命令,如RGB LED振幅電平、連續或斷續模式,并通過專用I2C總線配置DLP控制器。
DLP電子系統基于汽車級元件,該元件可實現HUD系統操作所需的全部功能。該電子系統包括視頻處理和LED控制系統,支持適用于白天和夜間駕駛情況的高動態調光范圍。
高動態范圍LED控制系統概念
HUD應用對動態范圍要求非常高,在白天運行時支持的亮度要超過15000 cd/m^2,而在光線非常暗的夜間環境中,顯示圖形的亮度不能低于3 cd/m^2.HUD系統必須能夠在目標白點處保持全色深的圖形,并且動態范圍需超過5000:1.LED驅動器控制系統專為汽車HUD應用而開發,已經展示了全系列的功能。
采用Piccolo MCU的LED驅動器控制系統,可管理紅色、綠色和藍色LED調幅,保持正常的白點,并同步LED照明和DLP控制器。DLP控制器為DMD和相關的RGB LED使能信號提供高速數據。LED驅動器控制電路選用的每個器件都能采用符合汽車標準的德州儀器Q1(專為汽車而設計)元件。
DLP投影系統采用脈寬調制(PWM)的紅、綠和藍光打造全色深圖形,在所用的標準PWM技術內集成并同步調光功能。
該系統采用基于LED光線輸出的光學滯后反饋,為了獲得更高的亮度,在位段內的時段采用連續反饋模式保持穩定狀態的振幅。該示例如圖2所示。連續模式反饋已經證明可在100:1調光范圍工作。
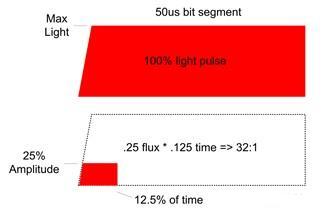
圖2.連續調光模式
該系統還采用了斷續模式反饋來生成少量脈沖光。該技術可將動態范圍擴展至超過5000:1的比例。圖3顯示了斷續模式光脈沖示例。
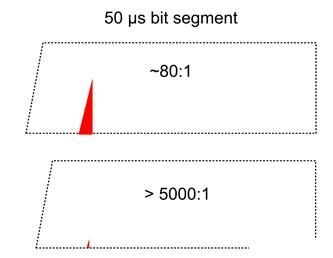
圖3.斷續調光模式
LED控制系統可采用連續和斷續操作模式,展示從15000 cd/m^2至低于3 cd/m^2的范圍內的自然調光。德州儀器概念系統中的已測數據如圖4所示。
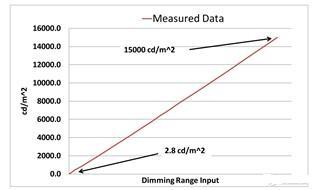
圖4.德州儀器概念系統的已測白光
除了實現較大動態范圍外,還須保持白點。為了在德州儀器概念系統中實施,我們選擇D65為目標白點,D65是大部分高清電視(HDTV)所采用的標準。此白點的目標色度值為x=0.313、y=0.329.如圖5和6所示,動態范圍內的已測數據保持接近目標白點,離目標色度點的總偏差不小于+/- 0.01.
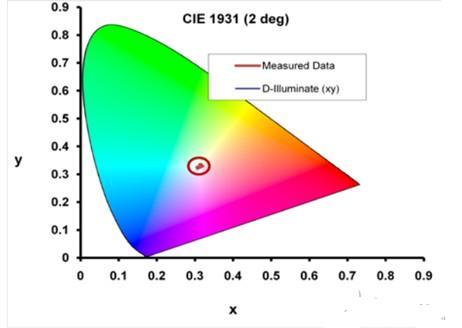
圖5.德州儀器概念系統的已測白點
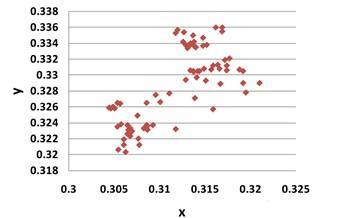
圖6.動態范圍外的已測白點
綜上所述,所實施的LED驅動器控制系統基于汽車級元件,這些元件證明符合高動態范圍,可滿足白天和夜間觀看條件,同時能夠保持精確的白點控制。DLP HUD光學系統
DLP汽車投影系統具有一些特性,能支持帶有適用于新一代增強現實顯示器的VWFOV(非常寬視角)的HUD系統。DLP在光學、機械容量管理和日光熱管理的設計靈活性方面,具有明顯的優勢。
HUD光學系統的目的是在道路前方數米觀看距離中為駕駛員呈現虛擬顯示。該虛擬顯示可能包含儀表盤數據,如速度、導航數據或其它協助駕駛員的實時信息。用于創建此虛擬顯示的光學裝置通常包括1至3個注塑模具非球面鏡片,具體取決于虛擬圖像所需的光學矯正水平和視野(FOV)范圍。圖7顯示了HUD鏡像光學設計示例。
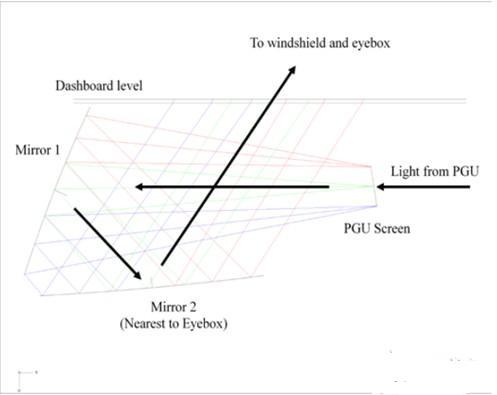
圖7– HUD光學設計概念
現有汽車HUD的圖像源來自于LED陣列背光的LCD面板。隨著該行業不斷朝著寬視野范圍的抬頭顯示系統發展,有些技術局限是LCD技術很難解決的。DLP投影技術則提供了可能的替代HUD圖像生成單元(PGU)。隨著抬頭顯示視野范圍不斷擴大,采用DLP技術作為HUD圖像源的優勢愈發明顯。對于視野非常廣的抬頭顯示系統,如增強現實顯示所需的系統,DLP可能是唯一合理的解決方案,它能夠提供將上述抬頭顯示系統部署在汽車內所需的亮度和設計靈活性。DLP支持光學設計的靈活性,適用于圖像質量和機械布局。
光學設計靈活性
基于DLP的抬頭顯示系統將采用可進行優化的中間成像平面,使抬頭顯示鏡面系統在機械方面適合汽車儀表盤。通過調整投影鏡頭的投影距離和重調焦距,可輕松調整中間畫面大小。
HUD鏡面光學設計受到各種光學和機械要求的限制,這些限制主要包括寬視野、圖像亮度、眼動范圍(eyebox)大小和位置以及機械包絡。而分辨率、圖像朝向和圖像失真等次要限制也同樣重要,但其對光學時效產生的影響較小。很多限制相互矛盾,其中一個示例就是光學設計相對于視野范圍寬度的機械緊湊性。最接近眼動范圍的鏡面尺寸如上圖所示,完全由視野大小、眼動范圍的位置和大小來確定。圖8顯示了終極抬頭顯示鏡面尺寸與全視野(FFOV)的比較。
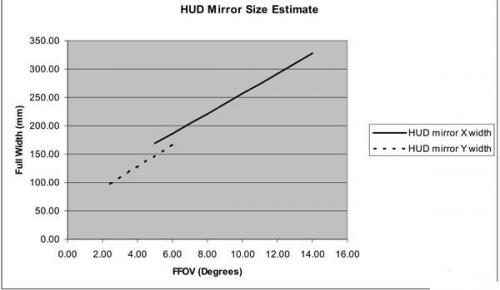
圖8– FFOV與HUD鏡面大小之比較
其余的鏡面尺寸和機械折疊裝置受到HUD鏡片光學裝置的中間成像屏幕影響較大。支持中間成像屏幕的大小隨著設計限制而變化,可靈活地使視野非常廣的系統通過折疊將體積變小,從而裝入儀表盤中。
在DLP HUD概念中,投影圖形單元(PGU)在中間成像屏幕中形成DMD的小型放大明亮圖像。該投影屏幕圖像通過抬頭顯示鏡光學裝置進行放大,為駕駛員打造虛擬顯示。HUD鏡光學裝置的設計人員不受固定圖像大小或基于LCD系統的圖像放大率的限制。可靈活選擇最佳放大倍率和/或焦距能夠給設計人員帶來很多好處,可支持替代光學機械折疊配置。此外,這種靈活性可減少光學像差,最大限度地降低抬頭顯示設計的第二和第三鏡面。
對于15度或更高角度的寬視角顯示,要保持受人眼限制的圖像分辨率就必須增加像素。圖9顯示了每視角的最小可解析分辨率繪圖。基于DLP的系統可以輕松實現1200以上的像素,從而實現超過20度的寬視角。此外,中間成像的大小與像素數無關,可支持上述設計靈活性。
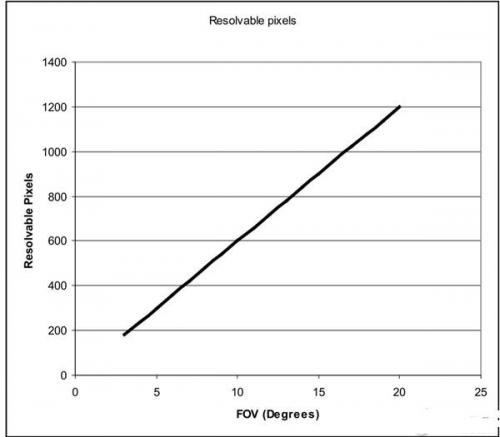
圖9–分辨率與視野之比較
熱負荷考量
DLP PGU系統在熱負荷管理方面功能強大。基于DLP的PGU有3個獨立的RGB LED光源,這些光源可在遠離中間屏幕及相關陽光反射物的遠程位置單獨進行冷卻。DMD本身可從LED中分離出來,允許單獨對DMD進行熱量管理。這對基于DLP的HUD引擎有重大優勢,因此圖像生成裝置(DMD)與HUD中間成像屏幕和光源(LED)是熱絕緣的。
HUD系統中的另一熱源就是陽光直接照射圖像生成裝置所產生的輻射。陽光能進入HUD鏡光學裝置,并向下聚焦到成像器位置,從而大大增加局部的熱量。對于目前基于LCD的系統,冷卻鏡面通常用來幫助減少成像器上的太陽能總量。如果管理不善,成像器上聚焦的太陽能量可能成為LCD面板的隱患,會降低LCD成像器的性能。相反,基于DLP的PGU中間屏幕能夠有效地為成像器和電子元件隔離太陽輻射。由于有漫射屏,所以幾乎捕捉不到太陽輻射,也不會將太陽輻射反射回DMD.中間屏幕的漫射屏是被動光元件,它的設計能夠承受高水平的太陽輻射,同時不降低性能。
DMD的性能在熱負荷下非常強。例如,圖像對比度不受DMD熱量的影響。DMD能夠在炎熱或寒冷環境中保持其對比度。因此,基于DLP的PGU能夠在HUD系統要求的使用條件下正常運行。
對于有大視野范圍的HUD系統,DLP技術在性能、熱管理和光學設計靈活性方面具有顯而易見的獨特優勢。采用基于DLP的PGU光學設計人員能夠創建任何大小的HUD顯示源,從而更加自由地創建性能良好、適合儀表盤的HUD光學設計。此外,隔離熱源使基于DMD PGU的HUD系統在嚴苛環境下能更加穩定地運行。寬視角和增強現實HUD系統可以得益于DLP投影所帶來的優勢。






評論