高加速度下的時鐘源管理

引言
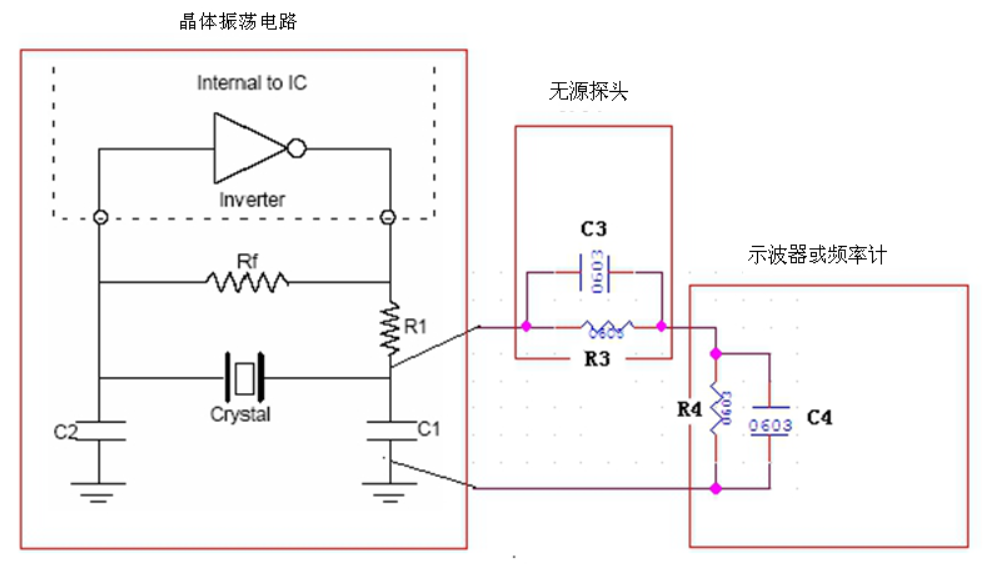
本文引用地址:http://www.j9360.com/article/201706/348319.htm在高加速度環境下,由于石英晶體振蕩器本身的機械特性,它在100000g的情況下,自身就有損壞的可能。而硅振蕩器啟動一致和快速,不像RC電路那樣易受到性能欠佳問題的阻擾。標準的硅片制造和組裝技術意味著,硅振蕩器本身不受沖擊和震動影響,也沒有磨損問題。
為了降低晶振的加速度敏感度,已經開展了大量的研究工作,提出了各種改進和補償的方法,概括起來分為兩類:無源法和有源法。
無源法有選用新切型晶體、改進品體結構安裝和加工工藝、雙晶體配對,以及振動隔離措施等。有源法是將振動效應通過傳感器、放大器反饋到振蕩電路或晶體上去,包括控制變容管補償法和控制晶體極化效應補償法,還有通過單片機控制其電壓來調節晶振的頻率。而以上這些方法普遍存在系統復雜、實現困難、限制嚴格等弊端,無法普及推廣。
為此,提出采用硅振蕩器和晶振在高加速度下轉換的方法實現兩種振蕩器優勢互補,采用頻率合成的方法給出轉換的條件,并通過實驗來驗證其可行性。
1 實驗原理
選用的晶體振蕩器與硅振蕩器的數學模型為:
u1(t)=U1cos(w1t+θ1) (1)
u2(t)=U2cos(w2t+θ2) (2)
通過鎖相環和低通濾波器后的輸出為:
當u1(t)和u2(t)的相位差為0時,(w2-w1)t+(θ2-θ1)為0,此時的uo(t)的幅值為最大。而要讓u1(t)和u2(t)能平穩轉換,則要保證它們的相位差為 ,即使uo(t)的幅值為
,即使uo(t)的幅值為 時開始轉換,此時選用電壓比較器來控制。
時開始轉換,此時選用電壓比較器來控制。
2 轉換電路設計
先將uo(t)接正極, 接負極,作為電壓比較器的兩個輸入。當uo(t)大于
接負極,作為電壓比較器的兩個輸入。當uo(t)大于 時,輸出C為0,反之則為1。外部榆測信號C是否為0,若為0,則外部信號G給一個上升沿信號作為切換允許的條件,并停止檢測C的狀態,此時選擇硅振蕩器為輸出時鐘。選擇器的選擇信號S由D觸發器來產生,其中D觸發器的邏輯關系為當C為0、G為上升沿時輸出Q為Q’,當C為1、G為上升沿時輸出Q為Q,所以D觸發器的輸人為C’Q’+CQ。轉換框圖如圖1所示。
時,輸出C為0,反之則為1。外部榆測信號C是否為0,若為0,則外部信號G給一個上升沿信號作為切換允許的條件,并停止檢測C的狀態,此時選擇硅振蕩器為輸出時鐘。選擇器的選擇信號S由D觸發器來產生,其中D觸發器的邏輯關系為當C為0、G為上升沿時輸出Q為Q’,當C為1、G為上升沿時輸出Q為Q,所以D觸發器的輸人為C’Q’+CQ。轉換框圖如圖1所示。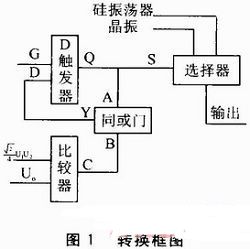
3 實驗結果與分析
通過電路設計在示波器上觀察其輸出結果,如圖2~圖4所示。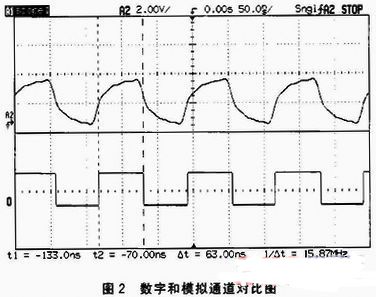
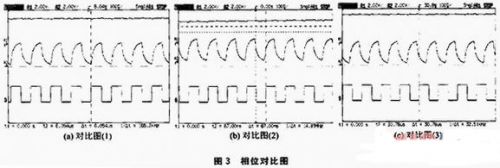

圖2為晶振的模擬通道和數字通道的對比圖。圖3為在頻率合成圖幅值是 之間硅振蕩器和晶振的相位對比圖。圖4為總體波形圖,包括頻率合成圖、硅振蕩器輸出圖和晶振的邏輯分析輸出圖。
之間硅振蕩器和晶振的相位對比圖。圖4為總體波形圖,包括頻率合成圖、硅振蕩器輸出圖和晶振的邏輯分析輸出圖。
從圖3中可以清晰地看出,在范圍之內相位差是比較小的,上升沿的轉換是可以一致的。而在范圍之外相位差就比較大了,上升沿與下降沿相對應,轉換會有跳變,不能實現平穩轉換。通過平穩轉換電路實現的轉換跳變不明顯,示波器上沒有明顯的跳變反應。
4 結論
通過實驗得出的波形與理論相符,在平穩轉換條件下能夠實現穩定轉換,這為下一步在高加速度條件下實現時鐘的精度校準提供了可行依據,也為其他的諸如單片機芯片不同頻率下的轉換提供了實驗依據和簡易方法。

評論