十六位CPU輕松實現,這都不是事兒

1.1 CPU 的數據通路
本文引用地址:http://www.j9360.com/article/201706/346850.htm模型計算機硬件系統的數據通路如圖 1-1。CPU 的字長為 16 位,內部采用 16 位寬的單總線結構,包括運算器和控制器兩個部件。為了便于后面的設計,圖中還包括了系統總線和存儲器,系統總線采用單總線結構,包括 16 位的數據總線 DB、16 位的地址總線 AB和控制總線 CB。主存、外設與 CPU 共用一組系統總線;CPU 內部總線 IB 與系統總線間通過 DR、AR 相聯。主存儲器的字長也是 16 位,并且按字編址,不能按字節訪問。
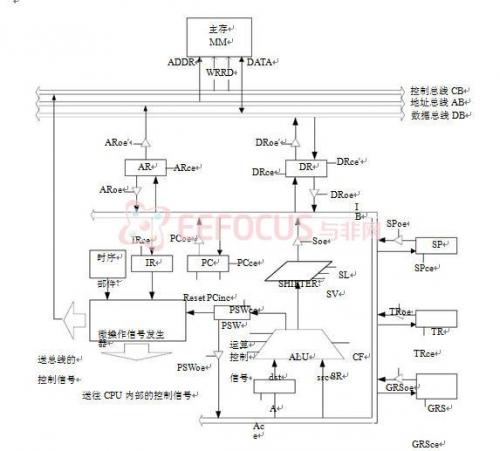
圖 1-1 模型計算機硬件系統的數據通路
1.2 指令系統
模型機的指令系統包括各類傳送類指令、算術邏輯運算類指令、移位類指令、轉移類指令、子程序調用返回指令、輸入輸出類指令等。在尋址方式上采用最典型的尋址方式,分別是立即尋址、直接尋址、間接尋址、寄存器尋址、寄存器間接尋址、寄存器變址尋址、相對尋址 7 種。
1.2.1 指令格式
模型機指令格式規整,以單字指令為基礎,根據不同的尋址方式可擴展為雙字指令和三字指令,如圖 1-2所示。指令的第二字和第三字是一些常數,如立即數、直接地址、間接地址、偏移量等。
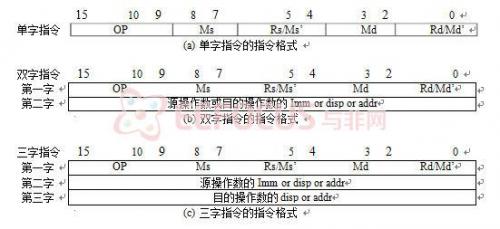
圖 1-2 指令格式
圖 1-2中,Ms 表示源操作數的尋址方式,Md 表示目的操作數的尋址方式,Rs 和 Rd分別表示的是源操作數和目的操作數的寄存器號。
1.2.2 尋址方式及編碼
在圖 1-2中可以看出,尋址方式 Ms、Md 分別由 IR 的 9、8 和 4、3 位表示。各位含義見表 1-1。
2
| |||||||||||||||||||||||||||||||||||||
1.2.3 雙操作數指令
本模型機設計了 9 條雙操作數指令:

1.2.4.1 移位類指令


1.2.4.3 單操作數運算指令和無條件轉移指令
INC、DEC、 NOT、JMP
指令編碼:

1.2.4.4 堆棧指令和子程序調用指令
PUSH、POP、CALL
指令編碼:

1.2.5 無操作數指令
模型機設計有 4 條無操作數指令(NOP、RET、HALT、RETI)。由于沒有操作數,(IR15~5
用全 0 表示擴展,(IR4~0)用于表示無操作數指令的操作碼,其指令格式如下。

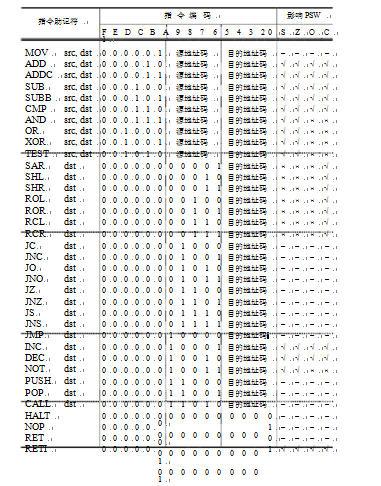
表 1-2 指令操作碼編碼表
1.3 微程序控制器
1.3.1 微程序控制器的基本構成
微程序控制器由五部分組成,基本組成框圖如圖 1-3。
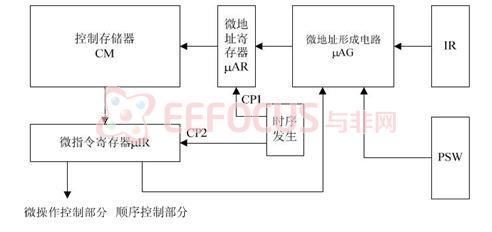
圖 1-3 微程序控制器的基本組成
(1)控制存儲器 CM ,存放微程序。
(2)微地址寄存器 uAR,存放 CM 地址。
(3)微指令寄存器 uIR ,存放由 CM 中取出的微指令。
(4)微地址形成線路 uAG,形成微地址,送給 uAR。
該電路有三個輸入,除了 µIR 的順序控制部分之外,還有 IR 和 PSW。IR 主要用于產生微程序的入口地址,比如依據指令的操作碼形成對應各指令執行階段的微程序入口地址。PSW 中的狀態標志,在某些需要判定是否符合條件的場合,決定分支轉移的微地址。
(5)時序部件,產生微程序控制器的時鐘信號。
微程序控制器的基本時序單位是微周期,微周期是一條微指令執行所需的時間,一條微指令的執行時間包括兩部分:一部分是從 CM 中讀取微指令所需要的時間,這個時間便是 ROM 的讀出時間,另一部分是微指令執行所需要的時間,這個時間包括微命令譯碼時間 CPU 內部數據通路的傳輸時間。
本設計中微程序的時序由 CP1 和 CP2 兩個等周期信號組成。CP1 信號上升沿的作用是將微地址打入控存微地址寄存器,啟動一次讀操作。CP2 的上升沿的作用是將從 CM 中讀取的微指令打入微指令寄存器,這標志著取微指令的結束和執行微指令的開始。顯然,CP1的上升沿到 CP2 的上升沿為取微指令時間,而從 CP2 的上升沿至下一個 CP1 的上升沿為執行微指令時間。
6
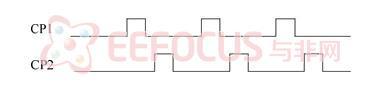
圖 1-4 微程序控制方式的時序
1.3.2 微指令格式設計
在本設計中,微指令的編碼方式采用字段直接編碼方式。微指令格式如表 1-3所示,其中數據傳送控制類微命令占 1,2 兩個字段,操作類命令占 3、4、5 共三個字段,下址字段 占 9 位,微轉移方式字段占 4 位,微轉移方式見表 1-4,微指令的總寬度為 32 位。
表 1-3 模型機微指令格式
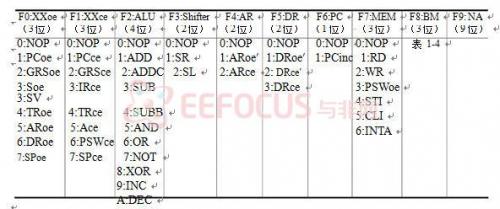
表 1-4 模型機微轉移方式字段 BM
BM | 操作 | 意義 |
0 | NA→µAR | 固定轉移 |
1 | NA→µAR,,INTR·IF→µAR7 | 根據是否有中斷請求且是否允許中斷產生兩分支 |
2 | NA→µAR, ——— ——— ——— ——— ——— ——— IR 15· IR 14· IR 13· IR 12·IR 11·IR 10→µAR ,1 ——— ——— ——— ——— ——— IR 9· IR · IR · IR8 7 6·IR 5→µAR0 | 形成取源操作數、取目的操作數和執行階段的微程序入 口地址。如果是雙操作數指令,則 µAR =0;如果是單1 操作數指令,則 µAR =1、µAR =0;如果是無操作數指1 0 令,則 µAR =1、µAR =1。1 0 |
3 | NA→µAR, ?{OP, PSW(Z,O,S, C)}→µAR0 | 根據條件轉移指令操作碼和 PSW 的 ZF、OF、SF、CF 狀 態標志決定微地址,若滿足條件 µAR =1,否則 µAR0 0 =0。 |
4 | 按操作碼 OP 多路轉移 | 按操作碼 OP形成多路微轉移地址 |
5 | NA→µAR,M→µAR1,0 | 按尋址方式 M 形成多路微轉移地址 |
6 | NA→µAR,M ′→µ AR2,1 | 按尋址方式 M′形成多路微轉移地址 |
7 | NA→µAR,IR + IR →µAR4 3 0 | 根據目的操作數是否為寄存器尋址產生兩分支:Md=00 (寄存器尋址),µAR =0;否則 µAR =1。0 0 |
7






評論