基于ZigBee技術的車路協同調速系統

引言
國外研究表明,車速的差值越大,車速分布越離散, 事故率就會越高。蒙納斯大學事故研究中心在1993年進行研 究得出的U型曲線,表明車速與平均車速的差值越大,事故 率越高。英國交通研究實驗室的EURO模型也表明事故率與 車速分布有很大關系,平均車速和車速差異都會影響事故 率,當均速為60km/h時,車速差異每降低1km/h,事故率將 降低2.56%。
圖1 基于ZigBee技術的智能車路協同系統框 
圖2 基于ZigBee技術的智能車路協同硬件系統框圖
國內學者對京津塘高速公路全線事故率進行統計研究 的結果表明: 尾隨相撞占事故率的53.6%; 速度差在15—
2 0 k m / h 內事故率顯著上升。 國內其他研究也表明, 可將20km/h視為速度差的安全閾值[1-2]。但是,高速公路的主線 與匝道之間的平均車速卻存在顯著差異:高速主車道均速一 般為100km/h,匝道出入口均速為60km/h。二者存在40km/h 的速度差,遠大于安全閾值。因此,高速公路匝道出入口處 是事故多發路段。為了改善事故多發現狀,僅僅在匝道附近設置路標的 效果非常有限。本設計基于車聯網技術,設計了一種基于 Zigbee技術的車速輔助調節系統,旨在改善車速分布的離散
程度,輔助駕駛員安全通過事故多發路段。
1 系統整體設計
智能車路協同系統主要用于高速匝道地段,旨在實現
智能輔助駕駛。整個系統分為路測和車載兩大部分,兩者之 間通過低功耗局域網協議ZigBee(又稱紫蜂協議)技術進行 通訊,使車路更加緊密協調,智能地連成一個整體。系統如 圖1所示。
路測部分包括車輛自動檢測模塊、微控制單元模塊、 ZigBee無線發射模塊和電源供電模塊。鑒于高速公路匝道出 入口的野外應用環境,系統內部選用超小型、低功耗的器 件,這樣既可以有效緩解電源供電的問題,又便于安裝和維
護。
車載部分包括車載設備和ZigBee無線接收模塊;接收模
圖3 動態車輛檢測電路原理圖 
圖4 系統程序流程圖
塊接收發射模塊的數據,車載設備處理接收數據并以聲音或 圖像的方式提醒駕駛員,實現智能輔助駕駛的設計目標。
2 各部分硬件設計
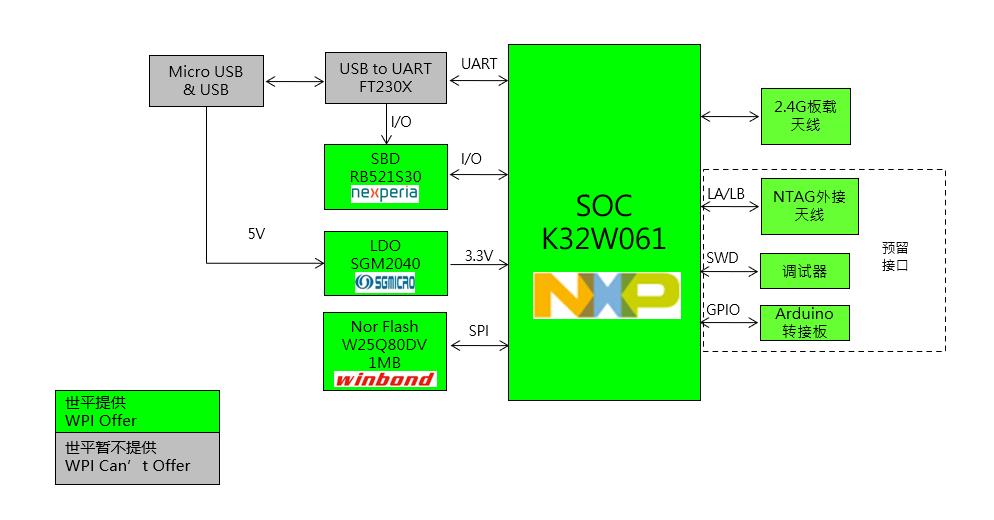
整個硬件系統由車輛自動檢測模塊、Msp430F169微控 制器模塊、ZigBee通信模塊、車載設備模塊和電源供電模塊 構成。結構框圖如圖2所示。
2.1 車輛檢測模塊
模塊主要由地感線圈和車輛檢測器構成。其中,地感 線圈采用0.75mm鐵氟龍導線繞制;車輛檢測器采用單通道 探測器(型號TLD-110),通過內部繼電器動作完成信號的 輸出。
其工作原理為:車輛駛過埋置有地感線圈檢測單元的
圖5 基于Android系統的APP客戶端
路 面 時 , 會 引 起
地 感 線 圈 電 感 值 的 變 化 ( 經 測 量 繞 制 的 地 感 線 圈 電感量為100uH左 右 , 車 輛 碾 壓 會 產 生 5 0 u H 左 右 的
變 化 ) , 進 而 導致振蕩電路輸出波形頻率出現明顯的變化,從而產生觸發信 號,使MCU對接受到的信號進行分析處理。兩組地感線圈 檢測單元的間隔距離一定,通過觸發時間差就可計算出車輛 行駛的速度。車輛檢測電路原理圖如圖3所示。
整個電路由地感線圈耦合電路、諧振電路、鎖相環電 路組成。設計采用電容反饋三點式諧振電路,將起始基準頻 率設計在100kHz左右以提高測量精度,完全滿足交通部下 發的GB/T26942-2011規定。T1為隔離變壓器,匝數比為1:
1,地感線圈L1作為諧振電路中的電感元件。利用鎖相環譯 碼器LM567與外接的環路低通濾波網絡來檢測車輛引起的頻 率變化,并將地感線圈的頻率變化轉變為高低電平輸出給后 續的控制模塊。







評論