基于CAN總線控制伺服的碼垛機器人系統

CAN(ControllerAreaNetwork)即控制器局域網絡,屬于總線式串行通信網絡,其成本低,安裝方便,主要用于各種設備監測及控制。其優點如下:
本文引用地址:http://www.j9360.com/article/201612/332208.htm①CAN總線可以多主方式工作,網絡上任意一個節點均可以在任意時刻主動地向其他節點發送信息,而不分主從,通訊方式靈活。還可分成不同的優先級,以滿足不同的實時要求。
②可以點對點、一點對多點及全局廣播等幾種方式傳送和接收數據。其傳輸速率可達1 MIbps,傳輸距離可達40 m。速率5 kbps時,距離可達10 km。
③采用短幀結構,每幀字節數最多為8個,可滿足通常工業領域中控制命令、工作狀態及測試數據的要求。傳輸n寸l盲-I短,受干擾少。
④采用不歸零(NRZ)編碼/解碼方式,并采用位填充技術。
⑤采用循環冗余碼校驗(CR)c、幀檢測、信號出錯檢測、總線監控、位填充等5種錯誤監測和糾錯措施,從而達到很高的可靠性。
⑥使用簡單方便。許多CAN控制器芯片如PCA82C200、SJAl000、8XC592等及一些DSP與單片機的片內(on—chip)CAN模塊實現了CAN的物理層及數據鏈路層的大部分,用戶只需要做兩件事:即對CAN控制器進行初始化和對CAN總線上的數據進行收發操作。⑦配置靈活,系統可擴充性好。CAN總線是基于發送報文的編碼,而不是對CAN控制節點進行編碼,故增刪CAN的控制節點不會對系統造成太大的影響。
本文介紹筆者為滿足武漢某鋼鐵集團硅鋼乍產線工藝要求所設計的一種基于CAN總線控制伺服的碼垛機器人系統(圖1)。具體參數要求如下:①行程:x軸2 000 mm,Y軸800 mm,Z軸800 mm,A軸_+3600,手抓張合30 mm;②最大負載重量為2 kg,額定負載1kg;每垛共20層,垛高200 mm,工件層與層間90°角交叉排放;④最快運行速度為800 mm/s,平均運行速度為500 mm/s;定位精度0.1 mm。
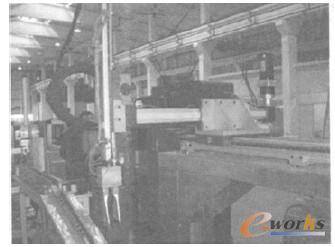

圖1機器人系統圖示
1 系統構成
(1)機器人采用德國RobWorker四軸(X、Y、Z直線軸和A旋轉軸)直角式坐標機器人,其機械手根據抓取工件的尺寸及抓取空間來設計,要求結果簡單、可靠、輕便。
(2)電動機采用法國施耐德公司的Lexium05A系列伺服電動機和德國百格拉步進電動機。
(3)觸摸屏采用臺灣WinView的觸摸屏MT508TV45 WV
(4)減速機根據各軸的運動速度、扭矩及轉動慣量,系統設計時在x、y、Z軸上各自加一臺減速機。
(5)中央處理器采用施耐德公司TSX Micro系列PLC:TSX 3721。
(6)CAN總線通信適配卡TSXCPPI 10。
(7)施耐德PLC編程軟件PL7 V4.4,施耐德伺服調試軟件Powersuit,通訊組態軟件Sycon。

評論