基于總線和網絡技術的開放式可監控數控系統

引言
本文引用地址:http://www.j9360.com/article/201612/332207.htm目前開放化是數控系統的研究熱點。開放式的技術基礎就是系統的模塊化,然而這種模塊化的設計在實現數控系統增量式功能拓展的同時,往往因追求密集的軟硬件設計而造成數控系統體積龐大,接口繁雜,功能重疊等負面效應。集中式模塊化設計中模塊間的模擬量及并行連線的方式,也使得數控系統的整體結構變得復雜,造成在信息交互密集的情況下,系統的實時性得不到有效的保證。另外,隨著工業現場環境和控制對象本身的日益龐雜,數控系統已從簡單的運動軌跡控制器轉變成貫穿數字化制造全過程的系統級平臺。數控設備在實現高速、高精、高效的加工自動化的過程中,對加工過程實時可控的要求越來越高,因此狀態監測也成為數控研究的一個重要方向。
與此同時,以PROFIBUS為代表的現場總線技術已經進入相對成熟的階段。現場總線能夠與上層的企業內部網(Intranet)和英特網(Internet)相連,為實現自動化企業一直追求的基于控制一監控一管理一體化的綜合自動化提供解決方案。隨著數控系統模塊化的趨勢,數控系統的很多功能單元已經擁有了單獨的控制器和運算器,具有了獨立的數據指令處理體系,迫切需要以一種全新的優化方式和拓撲結構融入到數控系統的功能框架中。而現場總線應用的基礎就是具備獨立智能控制能力和通訊能力的節點現場設備。可以說,將PROFIBUS為代表的總線技術應用到分布式數控系統的設計中,以實現數控系統的開放性和狀態監測是合適的,并且符合未來技術發展趨勢。因此,本文以總線技術為基礎,結合網絡和數據庫技術設計一種開放式可監測的數控系統。
1 數控系統框架
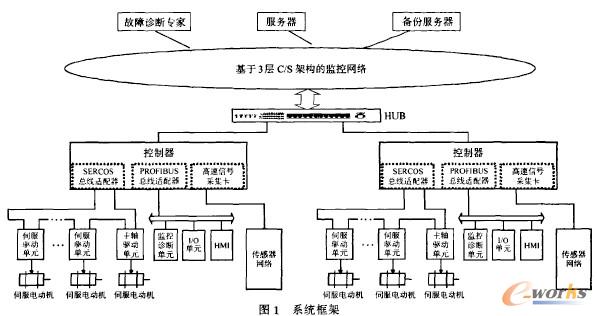
系統分為上、下2層網絡,分別為底層設備互聯網絡和遠程故障監測診斷網絡。下層的設備互聯網絡由PROFIBUS總線和SERCOS總線將各組成單元有機地聯系起來。以基于PC架構的控制器為核心,實現數控加工的正常控制和現場信號的采集、監測與上傳。上層監控網絡結合Internet技術和數據庫技術,采用3層C/S構架的信息交互模式。以數據庫為核心,將底層網絡上傳的數據存儲在數據庫服務器中,實現全系統的數據共享。上、下網絡之間的數據通訊通過安裝在控制器上的監控工作站實現。其結構如圖1所示。

2 底層設備互聯網絡的軟硬件體系架構
2.1 基于總線技術的底層設備互聯網絡的硬件平臺
底層網絡是由控制器、伺服驅動單元、主軸單元、I/O邏輯控制單元、HM I單元、總線接口卡等以總線方式連接的網絡,使用SERCOS和Profibus-DP2種總線[5]o SERCOS總線采用光纖傳輸,數據傳輸速率高,適合于多軸聯動控制。Profibus-DP總線是一種高速連接總線,專為自動控制系統與設備級分散I/O之間的通信而設計,適合于分布式控制系統的高速數據傳輸。基于此,本系統中伺服驅動單元和主軸單元采用SERCOS總線連接。I/O單元、HMI單元通過Profibus-DP總線與數控系統連接。其結構框圖如圖2所示。
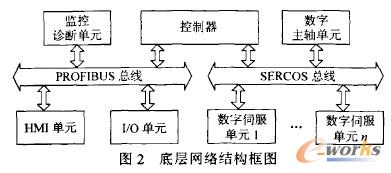
由圖2可見,相對于傳統的集中式數控系統結構,控制器的地位發生了變化,由原來的核心模塊變成了總線中的一個節點。盡管控制器仍然可以被設置為總線中的主設備并作為整個系統的控制主體,負責系統任務的發起和控制數據的生成。通訊方式的改變使其在拓撲結構上與其他外圍設備節點處于同等地位。
圖2中各模塊功能如下:
(1)控制器。它是整個總線系統的主設備,負責數控加工任務的規劃、指令與數據的生成、計算和輸出,網絡系統的初始化、任務的發起、狀態查詢、數據下載等工作。本文的控制器基于PC架構,通過總線接CI卡與總線連接。實際中使用的是Profibus-DP主站接口卡和SERCOS通信板卡。Profibus-DP主站接口卡是一塊智能DP協議卡,完成
PROFIBUS協議的鏈路層和物理層功能。該接口卡是從站和主站的連接橋梁,通過其內部數字信號處理器( DSP)芯片實現Prof ibus-DP的協議,能準確、及時地實現主、從站的數據交互。SERCOS通信板卡由ISA接口電路、譯碼電路、SERCOS處理器和光纖編碼接口組成,實現SERCOS主卡和從卡的通信。
(2)HMI單元。該單元可完成數控加工數據的輸入,同時還可處理與用戶操作和監控有關的系統功能,具備顯示、鍵盤處理、用戶數據傳輸等功能。
(3)I/O智能模塊單元。該單元是數控系統和現場設備中各種離散量的接口。該單元具有專門的處理器,具備智能數據處理和數據通訊能力,可獨立接收、執行總線上的命令。
(4)數字伺服驅動器單元。這是數控系統操控電動機運動的功率單元,是運動控制性能的關鍵部分。驅動器是系統的運動控制執行器,是與電動機等執行裝置和機械設備的接口,負責將控制器的任務和數據轉變成運動控制輸出,實現弱信號對強電流的控制。
(5)監控診斷單元。它是數控系統狀態監測、故障處理的獨立模塊。該模塊與傳感裝置直接連接,可實時采集設備關鍵部位的工作數據,并能進行預處理和應急處理,能夠在必要時與控制器建立信息交互。
底層設備互聯網絡中的模塊設備通過總線聯系在一起,各模塊不論掛接在哪個總線上,都遵循各自的總線通訊協議,按規定的格式交換信息,共同協調完成控制任務。這樣的設計使得系統的結構不僅在硬件上統一,而且在軟件接口上也有統一的形式。
2.2 控制器軟件結構圖
控制器的軟件分為基礎軟件平臺、應用平臺、應用程序3個層次,如圖3所示。
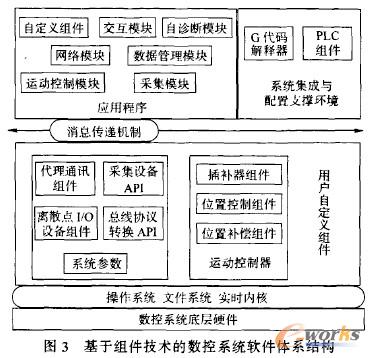
基礎軟件平臺由Venturcom公司的RTX ( realtime extension)和微軟公司的Windows 2000操作系統組成[bio Windows 2000操作系統可提供良好的圖形用戶界面、豐富實用的Win32 API函數、高效易用的開發工具、大量可用的第三方設備驅動程序。RTX為Windows 2000系統作了實時擴展,解決了Windows 2000系統在支持可預測線程同步、優先級可繼承、中斷延遲和線程切換的可預見性等方面的不足。數控系統實時性要求最高的插補運算和軟PLC等任務運行在RTX環境中。實際應用時,RTX為應用軟件提供了與Win32.dll功能類似的可動態加載和卸載的RT.dll,該動態連接庫可幫助實現應用程序對底層硬件的調用。

評論