CAN總線在織機狀態遠程集中監控系統應用

1 織機狀態遠程集中監控系統方案
本文引用地址:http://www.j9360.com/article/201612/332204.htm織機工作狀態參數眾多,對于織機狀態遠程集中監控系統來說,其主要目標是在異地對織機群整體狀態數據完成采集,提供計算、統計、分析和查詢功能,并能夠存儲、瀏覽和打印各類報表,為生產提供信息管理服務。主要包括:
(1)織機主要工作參數的監測。如生產班次、織機機臺號、車速、引緯率、產量、織物品種、織疵類型、停機時數、故障原因等。
(2)織機生產數據的分析與處理。如崗位、車間和企業層次的不同產品產量報表、各織機的工作效率、故障分類及原因等。
根據這一目標要求,加上織機正常工作時工作參數較多,沒有必要將單臺織機的各種數據全部集中到監控端處理,因此織機狀態遠程集中監控系統采取分級監控的方法。由于CAN總線是主要用于各種過程監控的一種網絡技術,為多主工作方式,可以進行點對點、一點對多點和全域廣播方式傳遞信息,且通信速率最高達1Mbps,傳輸距離可以達10km,具有極高的可靠性和較好的靈活性和實時性的優點。利用CAN總線所具有的這些優勢,采用CAN總線作為織機狀態信息雙向通信的網絡,實現對織機狀態遠程集中監控。織機狀態遠程集中監控系統結構示意圖如圖1所示。
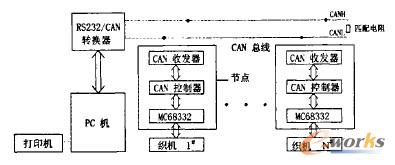

圖1織機狀態遠程集中監控系統結構示意圖
由圖1可知,該系統由單臺織機監控管理級和上位機遠程集中監控管理級兩大部分組成。單臺織機監控管理級主要由32位單片機MC68336完成織機工作參數設定、織機五大運動控制和織機工作狀態參數數據的處理,實現對單臺織機工作狀態的數據采集、處理和控制。
上位機遠程集中監控管理級主要由計算機、CAN總線和其他輔助外部設備如打印機等組成。CAN總線節點由單片機MC68332、CAN控制器、CAN收發器組成。CAN總線系統很容易擴展成針對多織機對象的監控系統。
系統的工作過程如下:系統開始工作時,對各個CAN總線節點MC68332、CAN控制器等進行初始化,MC68332接收織機各傳感器檢測的織機運動狀態參數進行數據處理,并將部分工藝參數顯示在織機顯示屏上。另一方面,上位機向CAN總線發出讀取各節點織機狀態參數的命令,MC68332接到命令后,將織機的主要工作參數,如織機機臺號、車速、引緯率、織物種類、產量、停機時數、故障原因等,按CAN規范規定的格式將其寫入CAN控制器的發送緩沖區內,并啟動發送命令,通過CAN總線傳輸給上位機進行分析處理,實現CAN網絡上的信息的接收與發送。
2 CAN總線系統節點硬件設計
CAN總線系統節點是網絡上信息的接收和發送站。本系統采用MC68332單片機作為CAN網絡的智能節點。CAN通信控制器選用SJAl000型,CAN收發器選用與之匹配的82C250型。CAN總線系統節點電路如圖2所示。
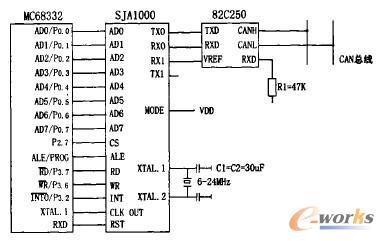
圖2 CAN總線系統節點電路如圖
為了保證CAN與MC68332單片機之間的時序同步,由CAN控制器SJAl000給MC68332提供時鐘信號。在實際應用時,82C250的CANH和CANL引腳通過一個120Q的電阻與CAN總線相連,起到限制過電流對82C250的沖擊作用,提高數據通信系統的抗干擾能力。
必要時,為了提高節點的抗干擾能力,可以在CAN控制器和CAN收發器之間增加光電隔離電路。由于CAN網絡不能直接連接到上位機的串行口,因此選用RS232,CAN轉換器實現相互之間的通信。

評論