基于CAN總線的汽車車身線束設計

0 前言
隨著電子技術的發展,越來越多的電器、電子設備在汽車上安裝使用。在為人們帶來方便、舒適的同時,卻使車內線束增多、空間緊張、布線復雜,從而導致車身重量明顯增加、運行可靠性降低、故障維修難度增大。另外,各電控單元之間傳遞的大部分信息是可由多個電控單元共享的,而傳統的點對點的通信方式不能實現信息共享。相應的,將CAN總線技術運用于車身電控單元線束設計即可輕松解決以上問題。
CAN(Controller Area Network)即控制器局域網,是博世公司開發的一種串行通信協議。和其它現場總線相比,性價比較高。CAN采用多主競爭總線形式,廢除傳統的站地址編碼方式,代之以對數據信息進行編碼,最多可標識2032(2.0A)或5億(2.0B)多個數據塊。數據通訊速率最大可達1Mbps(距離40m),能充分滿足信息的實時需要。短幀數據結構最長8個字節,占用總線時間很短,受干擾概率低。另外,CAN在錯誤檢測及自恢復能力方面的優勢,有力地保證了數據通訊的可靠性。
1 總體結構
車身網絡常由車內儀表、照明及信號燈組、自動車窗、座椅等電控節點組成。本系統中,網絡中包含車內儀表板和四組照明、信號燈組共五個節點。其中,照明、信號燈組中包括遠光燈、近光燈、轉向燈、霧燈、倒車燈、剎車燈,且不同燈的安裝位置不盡相同。如圖1:中央控制節點安裝在汽車儀表板上,接收司機的操作指令;其余四個節點則分別安裝在車頭、尾部的左側和右側,與不同車燈相連,控制車燈狀態。CAN總線將所有節點連接起來,組成一個汽車內部控制網絡。由于每個CAN節點與網絡連接只用兩根線:CAN_H線、CAN_L線,從而大大減少了線束使用量。
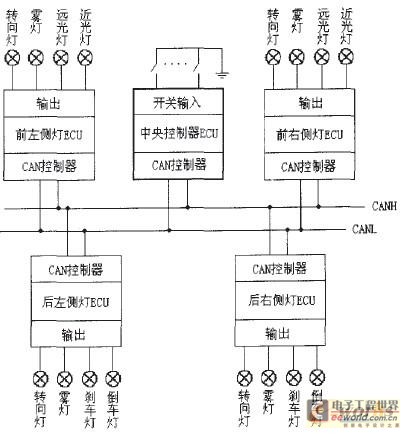
圖1 總體結構圖
2 CAN節點結構
本系統中,CAN節點采用以下電路結構:ECU(AT89C51)+CAN控制器(SJA1000)+CAN收發器(PCA82C250)Atmel AT89C5 1單片機是一種低功耗、低電壓、高性能的8位CMOS單片機,片內含有4KB Flash ROM,4個I/O口共32個I/O引腳,都可供用戶使用,而且其輸出引腳和指令系統都與MCS-51兼容,靈活性高且價廉。獨立CAN控制器PHILIPS SJAl000主要完成CAN的通信協議,支持CAN 2.0A/B協議,支持11/29位標識碼,具有擴展的64字節接收緩沖器,通信位速率可達1Mbps,即使在惡劣環境中也可正常、穩定地工作。PHILIPS PCA82C250是一種通用CAN收發器,是CAN控制器與物理總線之間的接口,對總線提供差動發送能力、對CAN控制器提供差動接收能力。節點主要電路見圖2(中央控制節點中AT89C51的P1端口與各車燈開關相連,其余節點的P1端口連接車燈)。
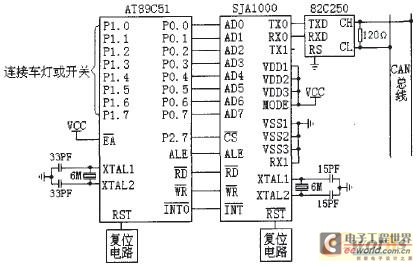
圖2 節點電路原理圖
3 報文傳輸
CAN2.0B給出了標準幀和擴展幀兩種報文格式,二者的主要區別在于報文所含標識符的位數不同,標準幀包含11位標識符,擴展幀包含29位標識符。考慮到系統的可擴展性和與其它系統的兼容性,本系統使用擴展幀格式。
報文中的標識符描述數據的含義,不同的幀的標識符不同。每個節點的接收器通過對幀進行接收濾波來確定此幀是否與自己有關,接收有關的,濾掉無關的。標識符同時定義了報文的靜態優先權。總線空閑時,任何單元都可以開始傳送報文,具有較高優先權報文的單元可以獲得總線的訪問權。車輛駕駛過程中,駕駛員根據需要控制儀表板上的車燈開關。中央控制節點實時監測每個開關的狀態變化,若發生變化則向總線上發出控制信號;其它節點對信號報文進行有選擇地接收、處理,并產生對相應車燈狀態的控制。表1中,每種車燈信號擁有一種報文標識符(除ID.20-ID.13外,其它位均為0)。
由于不同車燈在保障車輛安全行駛方面的重要性有輕重之分,車燈對應信號的優先級也應有所區別。表1中各報文的優先級由高到低排列為:剎車燈、倒車燈、應急燈、轉向燈、近光燈、遠光燈、霧燈。由于在同一時間總線上最多只能傳輸一個信號,當有多個信號同時發送時,優先級高的報文先傳輸,優先級低的報文后傳輸。
表1 報文定義

表1中,節點對報文有選擇性地接收,這是通過設置每個節點的驗收濾波器實現的。驗收濾波器由驗收代碼寄存器(ACR)和驗收屏蔽寄存器(AMR)組成,每個節點的設置如表2所示。

評論