基于CAN總線的汽車車身線束設計

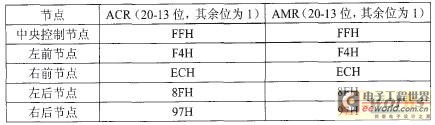
表2 節點驗收濾波器設置
4 軟件流程
中央控制節點的流程:見圖3。變量STATE存儲AT89C51的P1端口的狀態。從P1.0至P1.7,程序順序檢查每一位是否與STATE的對應位相同。若不同,表示與該端口相連的開關發生狀態變化,則根據變化的實際情況向總線發送報文。P1.7檢查完畢后重新對P1.0進行下一輪檢查。主節點的P1端口連接如表3。
表3 主節點的P1端口連接
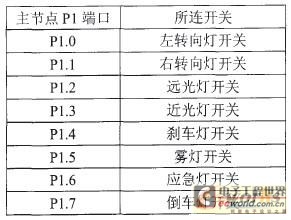
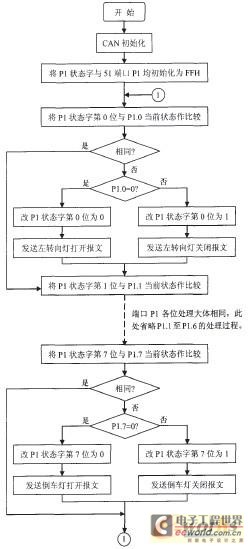
圖3 中央控制節點流程圖
其余節點的軟件流程:程序不斷查詢狀態寄存器(SR),監視RXFIFO中是否有新報文。若已收到新報文,首先根據報文標識符確定操作對象是哪個車燈;其次根據報文數據域的內容確定操作內容(開啟/關閉/閃爍);最終實施操作并開始重新查詢SR。其中,當使車燈(轉向燈、應急燈)閃爍時,車燈每兩次點亮之間的時間間隔為1s,即需要設定0.5s的延時,每到0.5s產生中斷,中斷服務程序將車燈的狀態(P1.0)置反。由于AT89C51定時器無法產生長達0.5s的延時,程序使用定時器T0(定時0.1s)和變量N(初值5)配合使用產生0.5s延時。T0中斷服務程序流程圖見圖4。
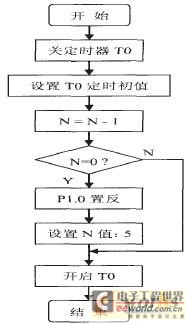
圖4 T0中斷服務程序流程
5 結束語
本實驗成功地驗證了將CAN總線技術應用于車身網絡設計的可行性,CAN總線具有高速、可靠、實時性好、易于維護且工程造價低等優點,很好地解決了車身線束設計中的諸多問題。此外,還可以將安全氣囊、懸架控制、牽引控制ABS等也加入車身網絡,從而進一步簡化車身線束和分布式控制。

評論