基于DSP的車載導航系統硬件電路設計與實現

摘要 為解決車輛在行駛中對交通信息的了解,文中針對車載導航系統功能需求,設計了基于DSP芯片的車載導航系統,提出了一種基于TMS3 20C6713B的DSP處理器車載導航系統設計方案,介紹了系統的硬件設計和實現方法。該系統具有結構簡單、可靠性高、維護方便,且有較好地繼承性等特點。
本文引用地址:http://www.j9360.com/article/201610/309927.htm數字信號微處理器DSP具有高速運行與數據處理的功能,以其高性能和低功耗的優勢為實時導航系統的數學計算提供了有效的硬件平臺。在現代武器裝備中,設計了基于DSP芯片的車載導航系統,其在民用和軍事領域均發揮著重要作用,系統具有高可靠性、安全性等特點。
1 車載導航系統工作原理
車載導航系統的主要功能是定時采集陀螺正交編碼信號、加速度計的輸入和里程計輸入信號,并對采集的數據進行必要的處理,以實現導航解算。同時將采集數據通過RS422總線和CAN總線發送至地面監測設備;并通過RS422總線接收相關的命令及參數。該系統結構如圖1所示。
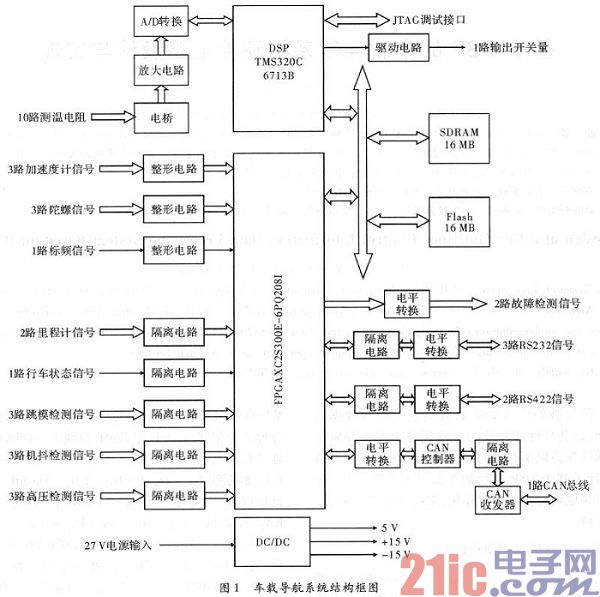
2 系統硬件設計
2.1 處理器及存儲器設計
車載導航系統電路采用TI公司的TMS320C6713B-A200作為DSP,該DSP芯片標稱主頻為200 MHz,工作在160 MHz主頻時DSP處理能力為1600 MI·s-1/1 200MFLOPS。使用40 MHz的晶振作為DSP的時鐘輸入,經內部鎖相環倍頻后作為DSP工作的時鐘,使用一片TPS70345電壓調整器為其提供3.3 V的IO電壓和1.2 V的內核電壓;采用一片容量為16 MB的MT48LC4M3282TG-7IT芯片作為SDRAM的存儲器,存儲器直接接入DSP的EMIF總線上,SDRAM芯片的地址線BA1、BA0和A11~A0接DSP芯片的EA15~EA2,數據線D31~D0接ED31~ED0。FlashRom芯片的地址線A22~A0接DSP芯片的GP13~CP11和EA21~EA2,數據線DQ15~DQ0,接ED15~ED0,初始化時GP13~GP13個引腳的狀態為高,SDRAM芯片的片選信號接DSP芯片的CE0;采用一片容量為16 MB的S29GL128N10TFIR1芯片為FlashRom存儲器,FlashRom芯片的片選信號接DSP芯片的CE1。之所以DSP芯片的CE1接到FlashRom的片選上,是因其引導方式采用從ROM加載,BOOT程序存放在FlashRom存儲器中。存儲器的讀寫信號均接到DSP芯片的AWE信號上。DSP通過EMIF總線接口訪問外部存儲器,可通過操作寄存器控制對外部存儲器的訪問,簡化了電路的設計。
2.2 電源設計
車載導航系統輸入電源為27±9 V,經MHF+28515將24 V轉換為+15 V和+5 V的電壓,MHF+28515的輸入電壓范圍為16~48 V,輸出功率15 W,其中+5 V電壓輸出最大功率為7.5 W,電流1 500 mA,+15 V電壓輸出功率最大分別為5 W,電路330 mA。由于車載導航系統電路自身+5 V電源使用的電流約為1000 mA,所以能提供+5 V,電流>140 mA的輸出給外部使用,為滿足系統中各部件的供電要求,設計了車載導航系統供電系統。
MHF+28515輸出的+5 V電源為整個模塊提供數字電源,其中CAN總線協議芯片等部分+5 V工作的芯片直接使用該電源;其他電路使用經轉換后的電源其處理方法包括:通過電壓調整器TPS70345將+5 V電源轉換成3.3 V和1.2 V電源,其中3.3 V供DSP外圍電路及SDRAM、Flash等芯片使用,1.2 V供DSP內核使用;通過電壓調整器TPS70351將+5 V電源轉換成3.3 V和1.8 V電壓,其中3.3 V供FPGA外圍電路、光耦等芯片使用,1.8 V供FPGA內核使用;通過兩個DC/DC模塊NKE0503將+5 V電源轉換成3.3 V電壓,一個供RS422隔離電路中的MAX3490及光耦使用,另一個供RS232隔離電路中的MAX3232及光耦使用。通過一個DC/DC模塊NME0505將+5 V電源進行隔離,供MAX481、CAN總線收發器和其通路上的光耦使用。MHF+28515輸出的±15 V電源為整個模塊提供模擬電源,其中+15 V電壓通過三端穩壓器JW78M05將電壓轉換成+5 V模擬電壓,供LM3940IMP和REF196使用;+5 V模擬電壓通過LM3940IMP轉換成3.3 V模擬電壓,為運放供電;+5 V模擬電壓通過REF196轉換成3.3 V模擬電壓,為電橋供電;+15 V和-15 V電壓則是為運放OP497供電。
2.3 輸入信號
車載導航系統電路輸入信號有3路加速度計信號、3路陀螺信號、兩路里程計信號、兩路標頻信號、一路行車狀態信號、9路狀態檢測信號和10路測溫信號。
加速度計信號的信號形式為可逆脈沖,幅值TTL,滿量程為256 kHz,經3路16位計數器計數,上升沿觸發,中斷5鎖存,加速度計信號采用RC濾波和帶施密特觸發輸入的反向器進行整形處理,然后通過74LVC244進行電平轉換后引入FPGA中。
陀螺信號的信號形式為正交編碼信號,幅值高電平4~5 V,低電平0~0.8 V,電流≤8 mA,頻率≤1.5 MHz,相位差90°±20°,經3路16位計數器計數,上升沿觸發,中斷5鎖存,陀螺信號也與加速度計信號相同,進行整形處理。而標頻信號頻率為128 kHz,幅值TTL,也信
號需整形。因此,標頻信號的處理形式和加速度計信號處理方法相同。
里程計信號包括兩路里程計信號、1路行車狀態信號和1路里程計地,幅值12 V,驅動能力30 mA,需光耦隔離,設置兩個16位計數器和1位狀態寄存器,分別記錄里程計脈沖輸入和狀態信息,里程計脈沖上升沿觸發計數,中斷5鎖存;要求行車狀態信號State可用命令使能和禁止,使能狀態下當State=1時,里程計信號加法計數;當State=0時,減法計數;禁止狀態下里程計信號加法計數,里程計信號先經RC濾波電路和保護二極管,然后經光隔進入FPGA。
狀態檢測信號包括3路跳模檢測信號、3路高壓狀態信號和3路機抖狀態信號,信號形式均為開關量,幅值為TTL,機抖狀態信號和高壓狀態信號需光耦隔離。跳模檢測信號處理形式和參數選擇與加速度計信號相同;高壓狀態信號和機抖檢測信號處理形式則與陀螺信號一致。
測溫信號包括10路測溫電阻輸入和1路測溫電阻輸入公共端,溫度范圍在-45~+70℃,測溫電阻與模塊上3個高精度電阻組成電橋,按照電橋工作原理,橋臂電阻的阻值應小于測溫電阻的最小值,并應當考慮一定的冗余,溫度系數的計算公式為R0×3.85×10-3,其中R0是0℃電阻,由于采用了高精度電阻和12位的AD,A/D轉換精度>0.5 ℃,可用多路開關實現。電橋兩臂中點分別接入運算放大器進行跟隨處理,再經后級放大后由A/D轉換芯片采集溫度測試結果,A/D轉換芯片采用串行接口芯片,與DSP的McBSP1接口連接,該芯片分辨率為12位,并具有10 μs的轉換時間及最大11路的A/D輸入。











評論