一種智能化吊艙地面檢測系統

某型光電跟蹤測量吊艙在飛行試驗中起著重要的作用,將其掛裝到載機上,載機與目標機伴隨飛行可以實現對目標機全飛行時段空中飛行的實時監控測量。由于飛行試驗本身花費巨大,這就要求我們必須確保吊艙在掛裝飛機飛行前各個系統工作是正常的,確保每個飛行架次都是有效架次。不同于文獻對吊艙具體部分的設計以及文獻對一個大型系統特定單一功能部分定制檢測,本文設計并實現了一種智能化吊艙地面檢測系統,該系統使用地面220 V交流電,能夠給吊艙供電,利用目標模擬器作為輔助,共同完成吊艙掛機前的全部功能檢測,并能夠對吊艙和機上操控設備的故障采用類似文獻中提出的技術進行智能化診斷定位。
本文引用地址:http://www.j9360.com/article/201610/308665.htm1 地面檢測系統需求分析
光電吊艙采用28 V直流電和115 V交流電供電,直流電給控制電路和各功能模塊供電,115 V交流電給伺服系統供電,因此地面檢測設備需要有提供28 V直流電和115 V交流電的功能。吊艙還具備高清、高速視頻跟蹤存儲功能,相應的地面檢測設備需具有視頻讀取檢測和下載能力。同時吊艙還具有激光測距、遙控遙測系統、環控系統等,因此,地面檢測系統須有相應的控制程序檢測對應系統的參數。不同于文獻采用PCI總線,本文通過RS422接口控制吊艙工作,通過地面控制計算機上設計的各功能模塊軟件檢測吊艙全部功能。
2 系統整體結構設計
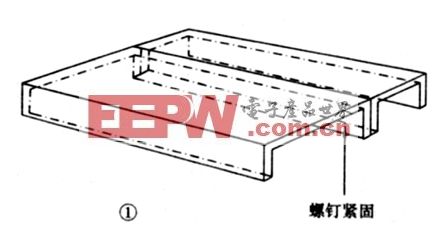
為了便于系統的安裝、調試,地面檢測設備所有組件集成在一個標準機柜內,由帶剎車的四輪推車推動,見圖1。

系統包括數據采集與控制計算機、開關/指示燈面、顯示器、鍵盤鼠標、連接插座、電源。其中:
1)開關/指示燈面板包括電源開關、電源和狀態指示燈等,面板后為信號調理箱(包括連接線纜、信號調理板等);
2)控制計算機加上相關的數據采集模塊,配合測試軟件,完成測試工作,它是整個系統的核心;
3)28 V直流電源(DC)和115 V 400 Hz交流電源(AC)采用兩個獨立的電源,具備過流和過壓保護功能。
3 地面檢測系統接口設計和電路設計
地面檢測設備給吊艙供電,然后對吊艙在啟動和正常工作中的所有待測信號進行檢測,通過RS422操控吊艙全部功能,電氣接口如圖2所示。其中:
1)1號插座,完成所有Camera Link信號(圖像傳輸信號)、1路PAL視頻信號的檢測;
2)2號插座,完成吊艙A/D信號、I/O信號、電阻阻值和4路RS422信號的檢測;
3)3號插座,完成機載操控設備的供電和RS422通訊檢測,繼電器1控制目標模擬器和機載操控設備的供電;
4)4號插座,完成吊艙的1路RS422通訊檢測和2種電源供電控制,其中繼電器2負責吊艙的28 V直流電源的供電控制,繼電器3負責吊艙的115 V交流電源的供電控制;
5)5號插座,輸入220 V交流電源,輸出給檢測設備及吊艙供電。
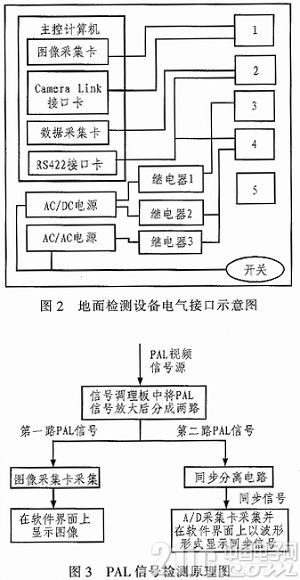
1號插座圖像采集卡采集的PAL視頻信號來源于被信號調理板放大后所分兩路視頻信號中的第一路,另一路視頻信號被用于測試軟件對圖像質量進行分析。具體PAL視頻信號檢測原理圖如圖3所示,其中分離電路輸出的同步信號通過A/D采集卡采集,在軟件界面上以波形的形式顯示,可以根據波形判斷同步信號。
4 軟件設計
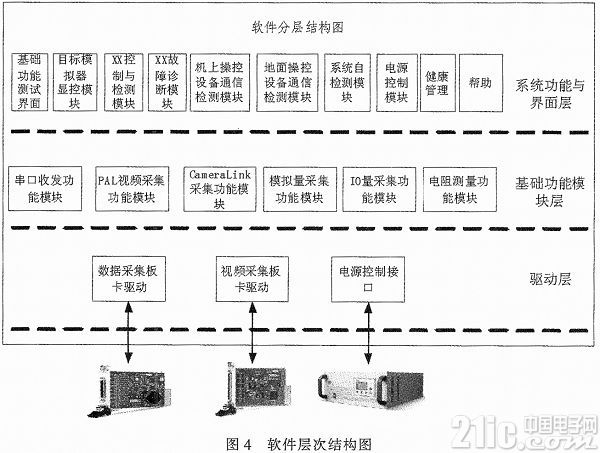
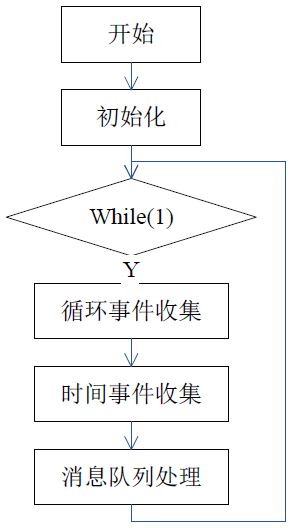
“吊艙地面檢測軟件”是運行在測試設備上的專用軟件,其主要作用是幫助試驗人員準確、方便、快捷地完成測試任務。根據項目的需求,該軟件既可對吊艙測試及調試,同時還具備系統故障診斷功能,所以在軟件設計時著重考慮通用性的要求,軟件架構如圖4所示。
基于上述架構模式,該應用軟件擬實現的主要功能如下:
a系統自檢測;b電源控制;c健康管理;d吊艙控制、測試與顯示;e吊艙故障診斷;f地面操控設備通訊測試與顯示;g機上操控設備通訊測試與顯示。
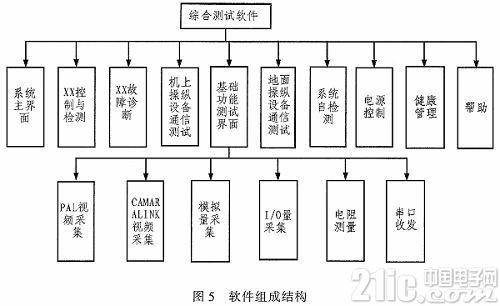
該軟件采用模塊化結構設計,管理軟件由用戶或系統管理人員調用,測試軟件由管理軟件調用,均可重入,如圖5所示。
基礎功能模塊主要實現對串口、視頻、模擬量的采集等功能,它以API函數的形成提供給系統功能模塊調用,實現了軟件的分層架構。
1)RS422收發模塊提供API函數,實現設置通訊波特率、串口輸出緩沖;
2)區設置、串口輸入緩沖區設置、串口收發等功能;
3)電阻值測量模塊提供API函數,實現對任意通路的電阻測量、測量參數的配置;
4)電壓測量模塊提供API函數,完成對任意通路的電壓測量、測量參數的配置;
5)Camera link采集模塊提供API函數,完成對Camera link的參數配置,實現對視頻信號的采集;
6)PAL視頻采集模塊提供API函數,實現對PAL視頻信號的采集;
7)離散量輸入/輸出測量模塊提供API函數,完成對參數配置和數據的采集;
8)電源控制模塊提供API函數實現對電源的控制。
軟件以圖形或表格化的形式表現出測試流程,允許用戶操作測試過程,實現測試過程的數據記錄、顯示,以及測試過程的啟動、停止、暫停、單步的操作。
對信號源和接口通道進行組合,按一定的時序關系配置,向被測件提供各種測試激勵,進而完成系統測試。
根據吊艙的故障種類分別建立故障檢測的測試流程,由軟件實現每種故障的檢測診斷流程如圖6所示,測試界面如圖7所示。
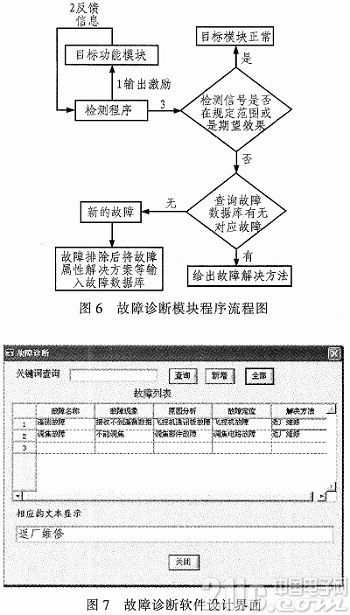
通過給吊艙輸出激勵采集其反饋信息的方法,檢測信號是否在規定的范圍內,或者檢測是否實現期望的效果。
針對每種故障,設計一套測試流程和測試界面,并將故障信息記錄到數據庫中。
將常見的故障現象存放在數據庫后,即可以通過關鍵詞進行查找分析故障原因。在檢測過程中將新的故障現象存入數據庫中,豐富故障庫內容。
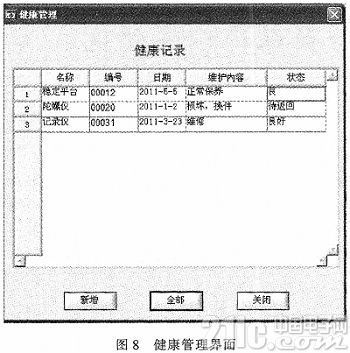
圖8是與故障診斷相互匹配的設備健康管理軟件界面。
5 結論
本文針對某型光電吊艙掛裝載機前的檢測問題設計實現了一整套智能化地面檢測系統,該地面檢測系統能夠快速智能的檢測目標吊艙的各項功能,對于檢測到的模塊故障能夠迅速給出故障原因及其解決方案。目前該系統已經在實踐中得到了很好的應用,有力地保障了科研試飛任務的進行。





評論