基于TMS320F28035的永磁同步電機矢量控制系統研究

永磁同步電動機(PMSM)具有體積小、重量輕、結構多樣、可靠性高等優點。在數控機床、工業機器人等自動化領域得到了廣泛的應用。數字化交流伺服調速系統采用的是目前非常流行的矢量控制算法,即電壓空間矢量脈寬調制(SVPWM)。SVPWM的主要思想是:以三相對稱正弦波電壓供電時三相對稱電動機定子理想磁鏈圓為參考標準,以三相逆變器不同開關模式作適當的切換,從而形成脈寬調制(PWM)波,以所形成的實際磁鏈矢量來追蹤其準確磁鏈圓。
本文引用地址:http://www.j9360.com/article/201610/306665.htm由于矢量控制算法對采集PMSM轉子的電流、電壓等參數的實時性要求很高,且計算量大,一般的微處理器很難達到要求。因此,文中采用TI公司C2000系列高壓數字電機開發
套件,利用其DSP芯片TMS320F28035高速數據處理能力,使得整個電機控制系統具有控制精度高,實時性強的特點。
1 系統結構
針對永磁同步電機高階、多變量、非線性、強耦合的控制特點,如何有效解耦進而實現直流電機般的轉矩控制方式,一直以來都是主要的研究熱點。永磁同步電機的轉子機械位置和磁通位置的一致性,決定了其實現矢量控制方面的優越性。矢量控制即磁場定向控制,利用坐標變換消除原坐標系下參數的耦合,實現對電機的電磁轉矩和勵磁磁場進行分別控制,進而實現類似直流電機的轉矩控制。
目前,PMSM的矢量控制策略主要可以分為:id=0控制、力矩電流比最大控制、總磁鏈恒定控制、直接轉矩控制等。本系統采用id=0控制,該方法由于電樞反應沒有直軸去磁分量,就不會產生去磁效應,也就不會出現因永磁電機退磁而導致電機性能變壞的現象,能保證電機的電樞電流和電磁轉矩成正比,實現轉矩的線性化控制。要實現id=0的解耦控制通常有兩種實施方案:電流滯環控制和速度、電流的雙閉環控制。本系統選用速度、電流的雙閉環控制方式。
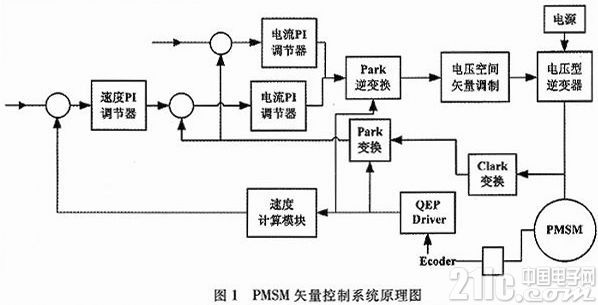
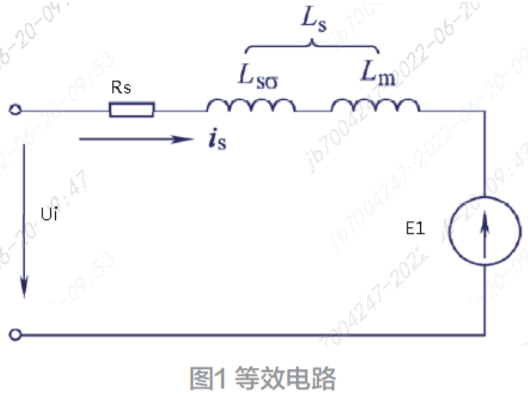
由圖1可知,永磁同步電機矢量控制系統有以下五部分組成:速度、電流PI調節器;坐標變換模塊;空間電壓矢量調制(SVPWM)模塊;電壓逆變模塊;位置與速度檢測模塊。系統的具體控制過程為:通過正交編碼器(QEP)對電機的位置和速度信號進行采樣,并將速度信號與速度指令信號進行比較,經速度PI調節器的調節后輸出指令信號;通過電流采樣獲得兩相定子電流信號(第三相可通過另外兩相計算得出),并經坐標變換得到電流信號;將電流信號分別與指令信號進行比較,經電流PI調節器調節后輸出d—q軸電壓信號,再經Park逆變換輸出軸電壓信號;通過SVPWM模塊輸出六路PWM信號驅動逆變器,產生頻率、幅值可變的三相正弦電流輸入電機,實現電機的驅動。
2 系統設計
2.1 系統硬件設計
基于DSP28035的永磁同步電機矢量控制系統組成主要包括:埃斯頓EMJ系列永磁同步電機、PC上位機以及TI高壓數字電機控制和功率因數校正(HVDMC+PFC)開發板。其中,TI公司C2000系列Piccolo TMS320F28035 DSP為其核心控制芯片。系統的硬件總體結構框圖如圖2所示。
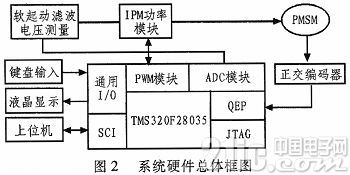
如圖2所示,系統以TI公司C2000 Piccolo系列TMS320F28035 DSP為其核心控制芯片,主要包括兩相整流模塊、軟起動濾波與電壓測量模塊、IPM功率模塊和電流測量模塊。外設包括JTAG仿真接口、SCI模塊、QEP模塊、ADC模塊、通用I/O口和PWM模塊。在程序運行的過程中,由JTAAG接口進行重載代碼,在線仿真;與上位機進行通信,利用SCI模塊進行擴展;通過通用I/O口與鍵盤和液晶顯示進行連接。
F28035芯片除了主要完成系統所需的控制算法,包括電壓、電流采樣的模/數轉換、Clark變換、Park變換、PI調節器、產生一定的PWM信號去控制系統工作外,還要負責與上位機進行實時通訊及完成系統所需的其他各項控制功能。HVDMC+PFC開發板主要由DSP芯片、主板模塊、交流電源輸入模塊、直流電源輸入模塊、輔助電源模塊、獨立聯合測試行動小組(Joint Test Action GroupJTAG)仿真模塊、兩相交錯功率因數校正模塊和三相逆變器模塊8部分組成。PFC和功率模塊(IPM)是其中兩個重要的組成。PFC的作用是將DSP輸出的PWM脈沖放大到足以驅動功率開關管,它能夠改善功率開關管的開關特性,從而減小開關損耗,提高整個系統的效率及功率器件工作的可靠性。
文中采用單個鎖定性霍爾原件做轉速和位置的檢測。由于霍爾元件具有尺寸小、質量輕、無觸點、外圍電路簡單、頻響寬、動態性能好、使用壽命長、調試方便等特點,用他可以做成各種傳感器。廣泛應用于位移測量、傾角測量、壓力測量、轉速或轉數等方面的測量。由于鎖定型霍爾元件是雙極觸發元件,所以通常鎖定型霍爾元件的導通時間等于截止時間,脈沖波形是占空比為50%的方波,它具有良好的穩定性和可靠性。在不考慮安裝誤差的情況下,鎖定型霍爾元件的輸出的上升沿和下降沿代表轉子位置為0和π,假設在相鄰的上升沿與下降沿之間的轉速保持不變,可以通過檢測相鄰上升沿和下降沿之間的時間差來計算轉速。計算出角速度w以后,便能計算出每個時刻的轉子位置值。
2.2 系統軟件設計
在完成硬件系統設計后,進行其軟件開發需要兩個工具:一個TI提供的JTAG接口的仿真器;另一個是集成開發環境CCS(Code Composer Studio)。整個系統軟件是由初始化
主程序和中斷子程序構成。主程序主要工作是初始化系統,把PWM處于SVPWM工作條件下,捕捉口CAP1和CAP2處于QEP工作狀態下,設定速度等;中斷程序主要完成讀取位置信息、采集電流、完成矢量轉換,并根據控制值產生相應的SVPWM波形。CCS作為智能化集成開發環境,能適應多種場合、多處理器的DSP項目需求,具有以下主要特點:
1)編程方式多樣,可使用匯編語言和C語音混合編程,不需要手動編寫大量匯編程序;
2)基于專業的行業標準,可視化的代碼編輯界面,操作具有較大的靈活性;
3)具有強大的調試能力,可查看寄存器值、設置斷點為探針、顯示波形等;
4)具有一個開放式應用程序接口(API),可以構建自定義的插件與其組件交互。
全數字化的永磁同步電機伺服系統最大的特點就是軟件伺服,即改變控制功能主要通過改變軟件設計來實現。軟件伺服增強了控制系統的靈活性,較少了更改硬件產生的成本風險,但是對系統軟件設計提出更高的要求。在PMSM矢量控制系統中,軟件設計要求在指定中斷周期內,對被控電流、位置、轉速信號進行采樣、邏輯運算,完成控制算法,輸出控制信號,并實時進行故障處理。本系統的軟件設計采用模塊化設計結構,分為主程序和中斷服務程序兩部分,主要包括系統初始化模塊、電流采樣模塊、坐標變換模塊、控制算法模塊、SVPWM發生模塊、QEP計算模塊、串行通信模塊等。
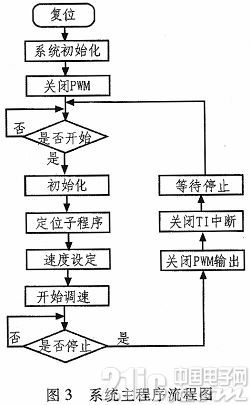
如圖3所示,系統初始化主要完成初始化控制系統(關閉看門狗和設定系統鎖相倍頻等)、PIE和外設等。關閉PWM是為了防止PWM1-6產生錯誤動作,定位子程序是為了獲得轉子對于光電編碼器的相對位置。系統初始化程序是對DSP的宏觀系統進行初始化,進行存儲空間、系統時鐘、系統看門狗、系統中斷的設置。
中斷服務程序是軟件設計的核心部分,包括定時器下溢中斷和CPU定時器中斷。定時器下溢中斷主要通過調用電流采樣處理、位置和轉速計算、小標變換、數字PID控制和SVPWM發生等功能子模塊實現系統控制算法、數據采集;CPU定時器中斷主要通過對采樣值的處理和I/O狀態的檢測來完成系統的軟件保護,并形成報警碼送顯。
3 系統實驗結果
以埃斯頓伺服電機(型號為EMJ-04APB22)為實驗對象,電機定子電阻R=2.8Ω,等效電感L=0.008 5H,轉子磁鏈ψf=0.175Wb,極對數Pm=6,轉動慣量J=0.000 87km·m2,力矩常數KT=0.575。
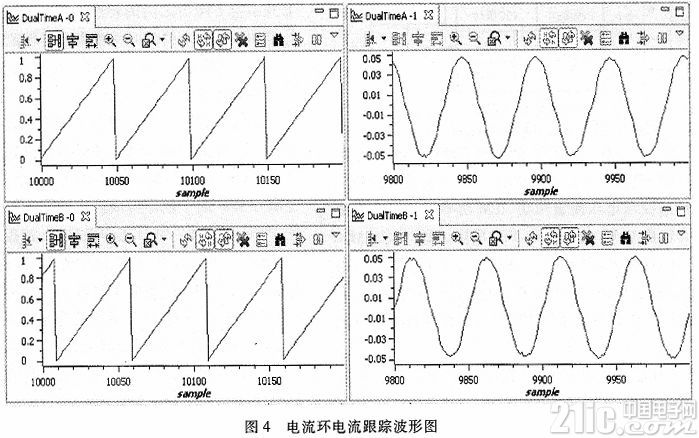
d、q軸電流在起動過程中,q軸電流經歷一個很小的超調量之后趨于穩定,穩定后q軸電流保持一個恒定幅值,d軸電流經過一個短暫的振蕩過程后趨于穩定,基本上等于給定電流且幅值幾乎保持0值不變,從而說明磁場定向準確,d、q軸電流完全解耦。圖4所示的為q軸給定電流與數據變換后q軸反饋電流波形。從該圖可以看出反饋電流能很好地跟蹤
給定電流,在給定±2 A電流時,反饋電流最大超調只有±300mA,而且很快穩定下來。
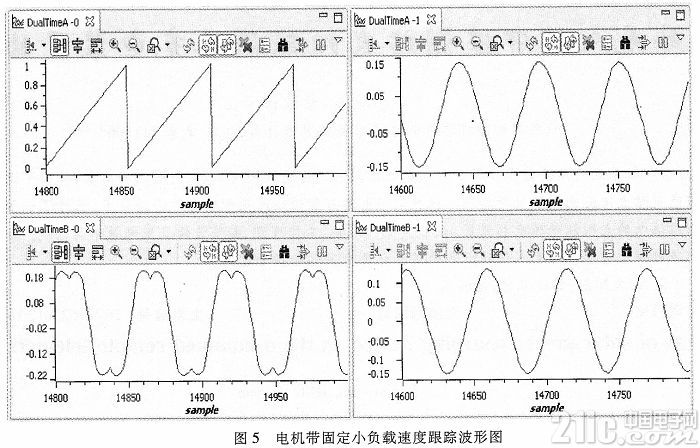
從圖5中得知,該電機的頻率為5 Hz,速度為+1 500 r/min,反饋速度能很快的跟蹤,且基本上無超調。在給定一個階躍后,系統大約經過0.035 s調節時間趨于穩定,三相電流波形完全平衡,并且有很好的正弦化趨勢。經過大約0.035 s的上升及調節時間,轉速趨于穩定,反映了系統響應的快速性,調節過程呈現過阻尼衰減振蕩形式,調節過程結束后,轉速反饋曲線與轉速給定曲線重合,反映出很好的跟隨性,但是調節過程有一個大約10%的超調量,在實際系統中,超調量會大大減小。
4 結論
本文PMSM控制系統采用TMS320F28035,充分運用DSP芯片速度快、運算能力強的優勢,使系統具有較好的動態特性和穩態精度。實驗結果表明,基于DSP所實現的矢量控制算法,在永磁同步電機驅動的應用上,電機的速度控制效果很理想。















評論